论文:Naiad: A Timely Dataflow System 作者:Derek G. Murray, Frank McSherry, Rebecca Isaacs 等(Microsoft Research) 发表:SOSP 2013(Best Paper Award)
这是系列文章的第一篇。整个系列将沿着一条技术演进路线展开:
- Timely Dataflow(本篇):用一个支持有环图的数据流模型,统一 batch、streaming 和 iterative 三种计算范式
- Differential Dataflow:如何在 timely dataflow 之上实现通用的增量计算
- Materialize:如何用 dataflow 引擎构建一个实时 SQL 数据库
这些内容最初是三年前学习的,大概是 Flink 和 RisingWave 的口水战期间,出于好奇去读了 Naiad 和 Differential Dataflow 的论文。最近花了点时间重新整理,发上来做个记录。
为什么需要 Timely Dataflow
2013 年前后,大数据处理领域有三条清晰的技术路线,但它们各自只能覆盖一种计算范式:
批处理系统(MapReduce、Spark):将数据分成批次处理,擅长大规模离线计算,但延迟在秒甚至分钟级别。即使只有一条新数据到来,也要等到一整批数据凑齐才能处理。
流处理系统(Storm、S4):逐条处理数据,延迟低,但计算模型受限。最大的问题是它们难以支持迭代计算——图计算中的 PageRank、机器学习中的梯度下降都需要反复迭代直到收敛,而纯流处理系统的 DAG(有向无环图)不支持这种循环结构。
图计算系统(Pregel、GraphLab):专门做迭代,但它们不擅长流处理和增量更新,迭代之间需要全局同步。
最终,实际生产中的数据管道往往变成这样:用 Storm 做实时预处理,用 Spark 做批量聚合,用 Pregel 做图计算——三套系统,三种编程模型,三组运维负担,还要处理它们之间的数据一致性。
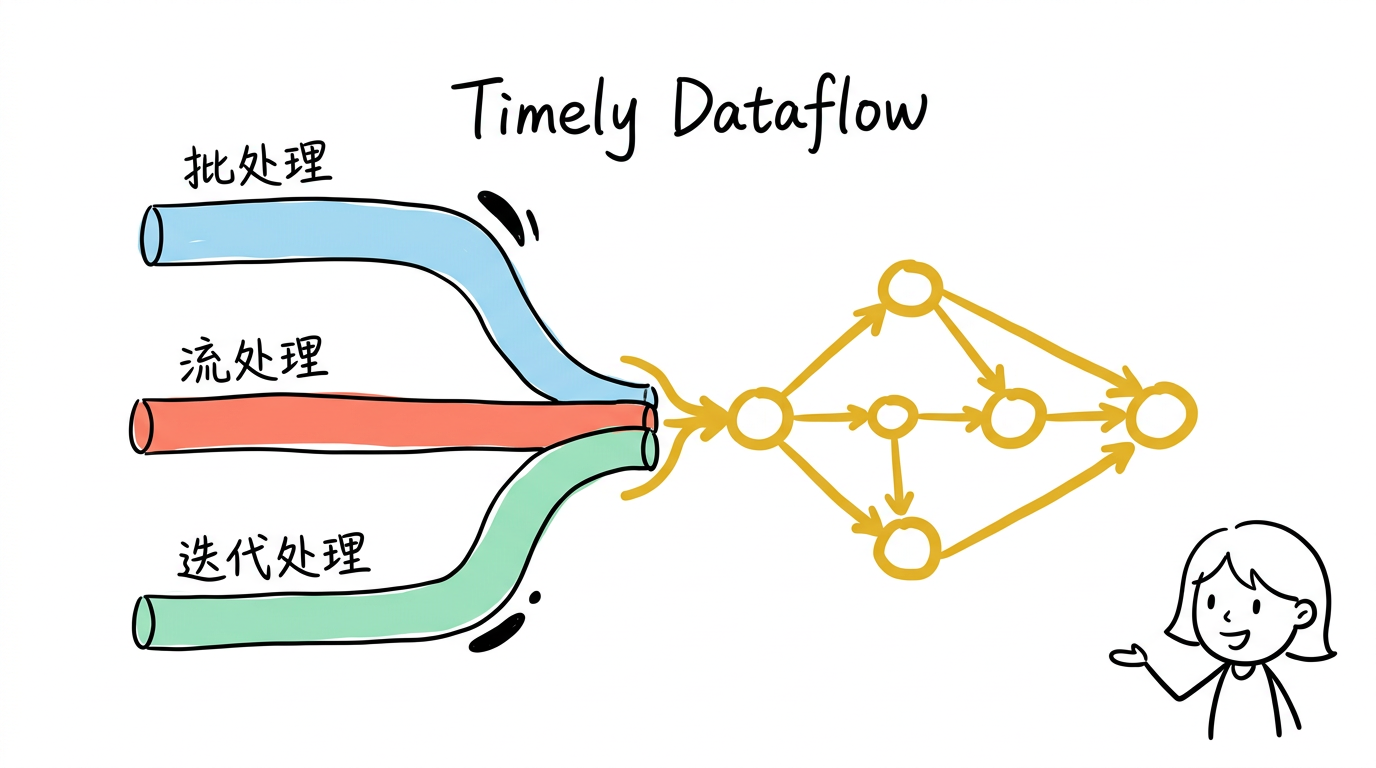
Naiad 的目标很直接:用一个统一的计算模型,同时支持 batch、streaming 和 iterative 计算,且延迟足够低。
这个统一模型就是 timely dataflow。
Timely Dataflow 计算模型
有向图,但可以有环
Dataflow 计算模型本身并不新鲜——计算被表达为一个有向图,节点是算子(operator),边是数据通道。数据从输入进入图,经过各个算子处理后,从输出流出。MapReduce 就是一种最简单的 dataflow:两个节点(Map 和 Reduce),一条边。
但传统 dataflow 系统要求图是无环的(DAG),这使得它们无法自然表达迭代计算。如果你想做 PageRank,只能在外部写一个循环,每次迭代手动将上一轮的输出喂回输入。
Timely dataflow 的核心区别是:它允许图中存在环(cycle)。迭代计算直接在图内完成——一个循环结构中的数据反复流过同一组算子,直到满足收敛条件后从循环中流出。
三种计算范式如何统一
有环图看起来只是一个小扩展,但它改变了模型的表达能力。下面来看三种范式如何自然映射到同一个 timely dataflow 图:
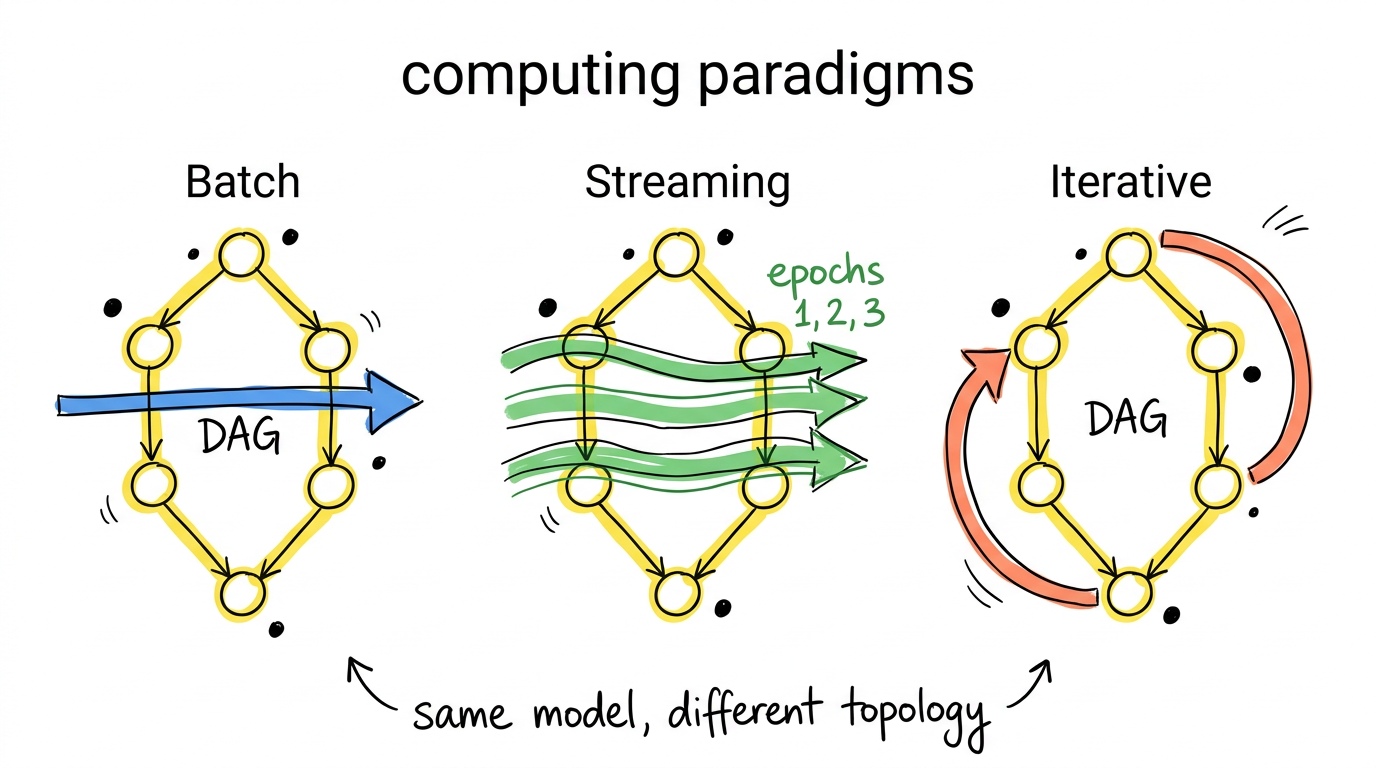
Batch(批处理):一批数据作为一个 epoch 注入 dataflow 图。所有数据流过算子、完成处理后,系统输出这个 epoch 的完整结果。没有环,没有迭代,就是一次性执行的 DAG。等价于 MapReduce 或 Spark 的一次 job。
Streaming(流处理):数据持续到来,每条(或每小批)数据作为一个新的 epoch 注入。Dataflow 图始终在运行,新数据到来时立即处理。不同 epoch 的数据可以在图中流水线式地并行处理——epoch 5 的数据在算子 A 处理的同时,epoch 4 的数据已经在算子 B 了。
Iterative(迭代计算):数据在图的循环结构中反复流转。每一轮迭代对应循环计数器加 1。当一轮迭代不再产生新数据(收敛了),数据从循环中流出。无需像 BSP 模型那样在每轮之间做全局同步。
这不是三种模式被硬塞进一个框架,而是它们本质上就是同一种计算模型在不同拓扑结构下的表现。 DAG 就是没有环的特殊情况,batch 就是只有一个 epoch 的特殊情况。
但这种统一带来了一个根本性的难题。
核心难题:什么时候算完了?
在 DAG 中,进度追踪是直觉化的——如果一个算子上游的所有消息都已到达,那它就可以安全地结束当前批次的处理。因为没有环,消息只会往一个方向流动,不会回头。
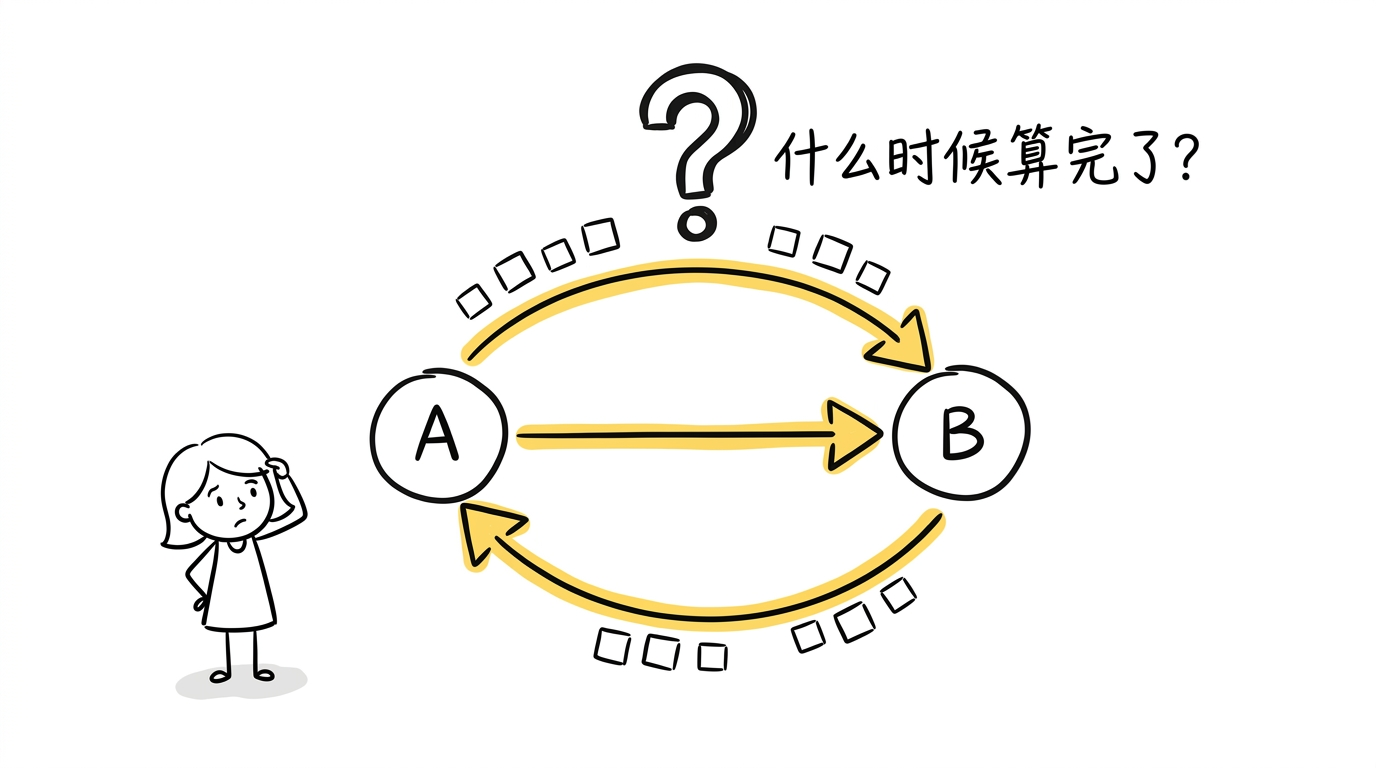
一旦有了环,情况就完全不同了。考虑一个迭代计算:算子 A 的输出经过算子 B 后可能会流回算子 A。那 A 怎么知道"时间 t 的所有消息已经到齐了"?B 可能还在产生新的消息,这些消息又会回到 A。而 A 的处理又可能触发 B 产生更多消息……
在有环图中,一个算子无法通过简单计数来判断自己是否收到了所有消息。 解决这个问题,是 Naiad 能够真正统一三种范式的前提——如果你无法判断某个时间点的计算是否完成,你就无法正确地输出结果,无法判断迭代是否收敛,也无法让不同 epoch 安全地并行。
Naiad 的回答是:一套精确的进度追踪协议。
时间戳设计
为了在有环图中追踪进度,Naiad 设计了一种层级化的时间戳结构:
$$t = (e, \langle c_1, c_2, \ldots, c_k \rangle)$$- $e$ 是 epoch,表示第几批输入数据。你往系统里灌了三批数据,分别是 epoch 1、2、3。Epoch 是外部输入的逻辑时间,和迭代无关。
- $c_1, c_2, \ldots, c_k$ 是循环计数器,表示这批数据在循环中的第几轮迭代。每个循环嵌套对应一个计数器。
例如,一个没有循环的 dataflow 中,时间戳就是简单的 $(e)$。如果有一层循环嵌套,时间戳变成 $(e, \langle c_1 \rangle)$,表示"第 $e$ 批输入数据,在循环中的第 $c_1$ 轮迭代"。
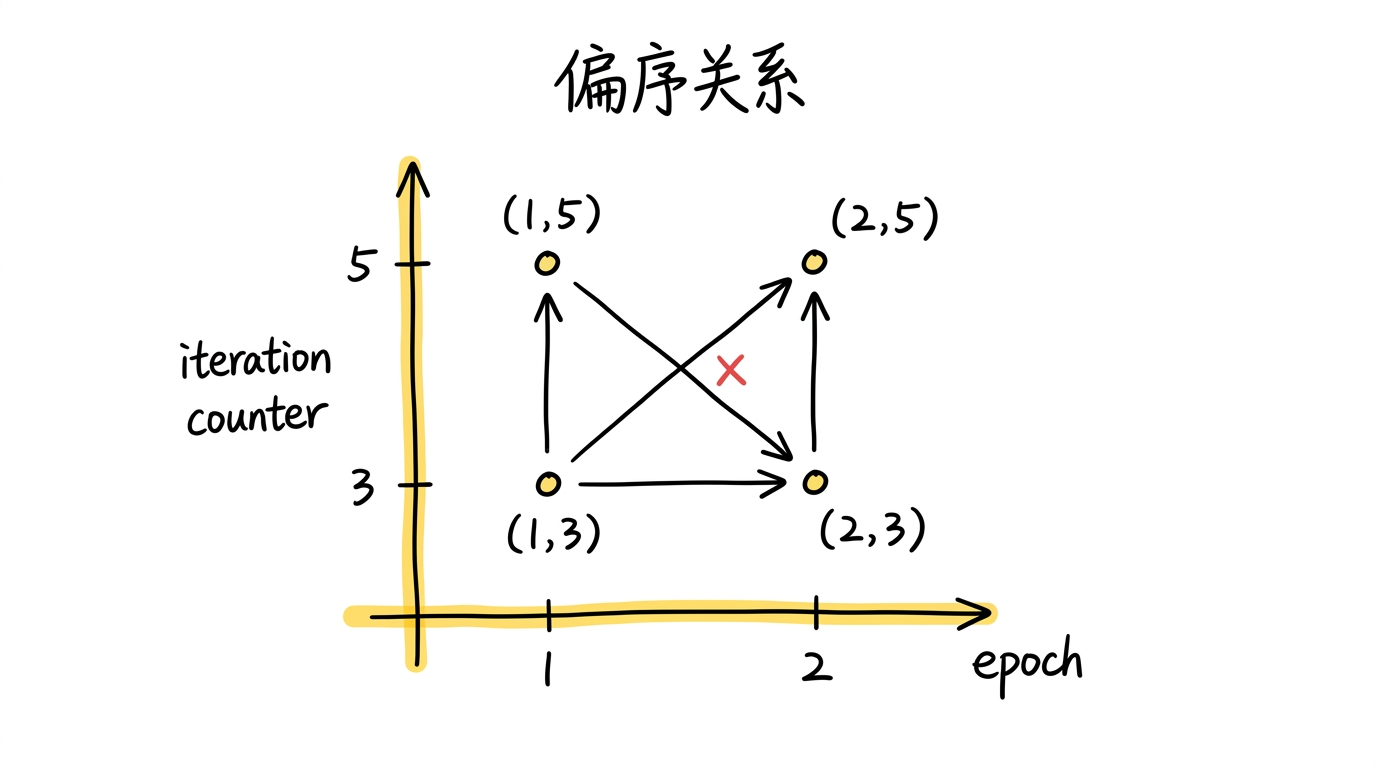
关键点:这些时间戳之间的关系是偏序(partial order),不是全序。
什么意思?全序意味着任意两个元素都可以比较大小,就像自然数:3 一定小于 5。但偏序允许两个元素不可比较。
时间戳的比较规则是:$(e_1, \langle c_1 \rangle) \leq (e_2, \langle c_2 \rangle)$ 当且仅当 $e_1 \leq e_2$ 且 $c_1 \leq c_2$——每个分量都必须 $\leq$。来看几个例子:
- $(1, \langle 3 \rangle) < (1, \langle 5 \rangle)$:同一个 epoch,迭代 3 在迭代 5 之前。两个分量都 $\leq$,可比较。
- $(1, \langle 3 \rangle) < (2, \langle 5 \rangle)$:epoch $1 < 2$,迭代 $3 < 5$,两个分量都 $\leq$,可比较。
- $(1, \langle 5 \rangle)$ 和 $(2, \langle 3 \rangle)$:epoch $1 < 2$,但迭代 $5 > 3$。两个分量方向相反,谁也不"先于"谁,不可比较。
最后这种不可比较的情况正是偏序的意义所在——epoch 1 的第 5 轮迭代和 epoch 2 的第 3 轮迭代是独立的计算,系统可以并行处理它们,不需要等一个完成后再做另一个。这种跨 epoch 的流水线并行,是 Naiad 实现低延迟的关键来源之一。
进度追踪协议
进度追踪协议(Progress Tracking Protocol)是 Naiad 论文最核心的技术贡献。它回答了那个根本问题:在有环图中,一个节点如何知道"时间 t 的所有消息都已到达"?
Pointstamp
协议的基本概念是 pointstamp,它是一个二元组:
$$\text{pointstamp} = (\text{timestamp}, \text{location})$$- timestamp 是上面描述的 $(e, \langle c_1, c_2, \ldots \rangle)$ 形式的时间戳
- location 是图中的一个位置(某条边或某个节点)
一个 pointstamp $(t, l)$ 表示"在位置 $l$ 上,还可能出现时间戳为 $t$ 的消息"。系统追踪的就是所有活跃的 pointstamp。
Could-Result-In 关系
协议的核心机制是 could-result-in 关系。给定两个 pointstamp $(t_1, l_1)$ 和 $(t_2, l_2)$,如果 $(t_1, l_1)$ could-result-in $(t_2, l_2)$,意味着位置 $l_1$ 上时间戳为 $t_1$ 的消息经过处理后,有可能在位置 $l_2$ 产生时间戳为 $t_2$ 的消息。
这个关系由图的拓扑结构决定:
- 普通边:消息沿边传递,时间戳不变。所以如果 $l_1 \to l_2$ 是一条普通边,那么 $(t, l_1)$ could-result-in $(t, l_2)$。
- 进入循环的边(ingress):时间戳增加一个新的循环计数器维度,初始值为 0。$(e, l_1)$ could-result-in $((e, \langle 0 \rangle), l_2)$。
- 循环反馈边(feedback):循环计数器加 1。$((e, \langle c \rangle), l_1)$ could-result-in $((e, \langle c+1 \rangle), l_2)$。
- 离开循环的边(egress):移除最内层的循环计数器维度。$((e, \langle c \rangle), l_1)$ could-result-in $(e, l_2)$。
通过沿着图的路径传递这些关系,系统可以判断:从任意 pointstamp 出发,未来可能产生哪些 pointstamp。
Frontier(前沿)
有了 could-result-in 关系,系统维护一个全局的 frontier。直观地说,frontier 表示"时间线上还没有完成的最早的那些时间戳"。
更精确地说,系统中每个位置都有一个 frontier——一个时间戳的集合(称为 antichain),满足:
- 集合中任意两个时间戳互不可比较(都不是对方的"之前")
- 任何未来可能出现的消息,其时间戳一定 $\geq$ 集合中的某个时间戳
当一个节点在位置 $l$ 上看到 frontier 推进到了 $t$,它就知道:不会再有时间戳 $< t$ 的消息到达 $l$。这时候,它可以安全地处理并输出时间 $t$ 之前的结果。
Notification(通知)
Naiad 的算子可以请求在特定时间戳收到 notification(通知)。当 frontier 推进到某个时间戳之后,对应的通知被触发,告诉算子:“时间 $t$ 的所有输入都已到齐,你可以产出最终结果了。”
例如,一个 count 算子需要等到时间 $t$ 的所有输入消息到齐后,才能输出该时间戳下的计数结果。它请求一个时间 $t$ 的通知,当收到通知时,输出 $(t, \text{count})$。
协议的运作方式
上面介绍了 pointstamp、could-result-in、frontier、notification 这些概念,但它们如何协同工作?让我们用一个具体的例子来看整个协议是如何运作的。
考虑一个带单层循环的 dataflow:算子 A 在循环中做迭代计算,每轮处理完后,一部分结果退出循环输出,一部分通过 Feedback 送回 A 继续迭代:
![]()
| |
图中标注了时间戳在各条边上如何变化:Ingress 为时间戳添加循环计数器维度,epoch 1 变为 $(1,\langle 0 \rangle)$;Feedback 将循环计数器加 1,$(1,\langle c \rangle)$ 变为 $(1,\langle c+1 \rangle)$;Egress 移除循环计数器维度,$(1,\langle c \rangle)$ 变为 epoch 1——循环外不再需要迭代信息。
协议追踪每个 pointstamp 的活跃计数(occurrence count),有两种东西会贡献计数:
- 未消费的消息:一条时间戳为 $t$ 的消息停留在边 $l$ 上,pointstamp $(t, l)$ 的计数 +1。
- Capability(能力声明):算子持有的一个令牌,表示"我还可能在时间戳 $t$ 上产生消息",对应 pointstamp 的计数 +1。
为什么需要 capability?因为算子的行为对系统来说是黑盒——系统不知道一个算子收到消息后会不会产生输出、什么时候产生、产生在哪个时间戳上。所以系统需要算子主动声明自己的意图。
具体来说,当算子收到一条时间戳为 $t$ 的消息时,它同时获得一个时间戳为 $t$ 的 capability。只要它持有这个 capability,系统就认为"该算子可能在时间戳 $t$(或更晚的时间戳)上产生新消息",因此不会推进 frontier。算子可以做三种操作:
- 持有:继续持有 capability,阻止 frontier 推进——比如一个聚合算子需要等齐同一时间戳的所有消息后才能输出,在此期间它必须持有 capability。
- 降级(downgrade):将 capability 的时间戳推进到更晚的值。这告诉系统"我不会再在原来的时间戳上产生消息了,但可能在更晚的时间戳上产生"。系统可以推进原时间戳的 frontier。
- 释放(drop):彻底放弃 capability,告诉系统"我不会再在这个时间戳上产生任何消息了"。对应 pointstamp 的活跃计数 -1。
当一个 pointstamp 的活跃计数归零——既没有未消费的消息,也没有算子持有对应的 capability——系统就知道这个 pointstamp 不会再有新的事件了。
逐步追踪
下面追踪 epoch 1 的数据在这个 dataflow 中的完整生命周期。为了聚焦核心机制,我们省略 Input 和 Output 的细节,从数据进入循环开始。
第 1 步:数据进入循环。
Input 发送 3 条 epoch 1 的数据后,宣布"不会再发送 epoch 1 的数据"(即 Input 将自己的 capability 推进到 epoch 2)。Ingress 将这 3 条消息的时间戳从 epoch 1 转换为 $(1,\langle 0 \rangle)$,发往 A。
此时系统中的活跃 pointstamp:
| 位置 | 时间戳 | 类型 | 计数 |
|---|---|---|---|
| Ingress → A 边 | $(1,\langle 0 \rangle)$ | 消息 | 3 |
A 还没有开始处理,也没有持有任何 capability。3 条消息停留在 A 的输入边上,每条贡献 1 个活跃计数。
第 2 步:A 开始处理第 0 轮。
A 从输入边取走 3 条消息(边上的活跃计数 -3),同时获得时间戳 $(1,\langle 0 \rangle)$ 的 capability(A 节点上的活跃计数 +1)。这个 capability 表示 A 还可能在 $(1,\langle 0 \rangle)$ 上产生输出。
| 位置 | 时间戳 | 类型 | 计数 |
|---|---|---|---|
| 算子 A | $(1,\langle 0 \rangle)$ | capability | 1 |
注意:边上的 3 条消息消失了,但 A 的 capability 保持着活跃计数。从系统的角度看,$(1,\langle 0 \rangle)$ 仍然"活着"——A 随时可能产生新的消息。
第 3 步:A 产生输出。
A 处理完 3 条消息后,决定:
- 2 条已收敛,发往 Egress(时间戳仍为 $(1,\langle 0 \rangle)$)
- 1 条需要继续迭代,发往 Feedback(时间戳仍为 $(1,\langle 0 \rangle)$)
发送完毕后,A drop 掉 $(1,\langle 0 \rangle)$ 的 capability——它已经完成了这个时间戳上的所有工作。
| 位置 | 时间戳 | 类型 | 计数 |
|---|---|---|---|
| A → Egress 边 | $(1,\langle 0 \rangle)$ | 消息 | 2 |
| A → Feedback 边 | $(1,\langle 0 \rangle)$ | 消息 | 1 |
A 的 capability 没了,A 上的活跃计数归零。那 $(1,\langle 0 \rangle)$ 是否彻底完成了?还不行——边上还有 3 条消息。
第 4 步:Feedback 转发,时间戳递增。
Feedback 取走边上的 1 条消息(A → Feedback 边上的计数 -1),将时间戳从 $(1,\langle 0 \rangle)$ 变为 $(1,\langle 1 \rangle)$,发到 A 的输入边。
| 位置 | 时间戳 | 类型 | 计数 |
|---|---|---|---|
| A → Egress 边 | $(1,\langle 0 \rangle)$ | 消息 | 2 |
| Feedback → A 边 | $(1,\langle 1 \rangle)$ | 消息 | 1 |
这是一个关键时刻。循环内部所有 $(1,\langle 0 \rangle)$ 的活跃计数都归零了(A 的 capability 已 drop,Feedback 边上的消息已取走)。唯一剩下的 $(1,\langle 0 \rangle)$ 是 Egress 输入边上的 2 条消息——但 Egress 是循环的出口,不会将数据送回 A。
系统现在检查 could-result-in:还有没有任何活跃 pointstamp,能在 A 处重新产生 $(1,\langle 0 \rangle)$?
逐一排查所有到达 A 的路径:
- Input → Ingress → A?Input 已推进到 epoch 2,Ingress 不会再产生 $(1,\langle 0 \rangle)$。
- Feedback → A?Feedback 的变换规则是 $\langle c \rangle \to \langle c+1 \rangle$。目前 Feedback → A 边上唯一的消息是 $(1,\langle 1 \rangle)$,它经过 A 处理后,如果再反馈,只会变成 $(1,\langle 2 \rangle)$、$(1,\langle 3 \rangle)$……永远回不到 $\langle 0 \rangle$。
结论:$(1,\langle 0 \rangle)$ 在 A 处永远不会再出现。A 的 frontier 从 $\{(1,\langle 0 \rangle)\}$ 推进到 $\{(1,\langle 1 \rangle)\}$。
第 5 步:第 1 轮迭代。
A 取走 Feedback → A 边上的 1 条 $(1,\langle 1 \rangle)$ 消息,获得 $(1,\langle 1 \rangle)$ 的 capability。处理后发现这条数据也收敛了,发往 Egress,不再发送任何消息到 Feedback。A drop 掉 $(1,\langle 1 \rangle)$ 的 capability。
| 位置 | 时间戳 | 类型 | 计数 |
|---|---|---|---|
| A → Egress 边 | $(1,\langle 0 \rangle)$ | 消息 | 2 |
| A → Egress 边 | $(1,\langle 1 \rangle)$ | 消息 | 1 |
| 循环内其他位置 | — | — | 全部为 0 |
循环内没有任何活跃 pointstamp 了。 A 没有 capability,Feedback 边上没有消息,Ingress 不会再送入数据。没有任何东西能在循环内产生新的 pointstamp。
Frontier 推进到 epoch 1 之后。 Egress 收到 notification:epoch 1 的所有迭代已完成,可以安全地输出 3 条最终结果(2 条来自迭代 0,1 条来自迭代 1)。
两个关键观察
系统不需要预先知道会迭代几轮。 它不关心"迭代是否收敛"这个语义问题——它只追踪 pointstamp 的活跃计数。当某轮迭代不再产生反馈消息时,Feedback 边上的活跃计数自然归零,frontier 自然推进。迭代收敛是进度追踪的结果,而不是需要额外检测的条件。
Feedback 边的时间戳递增是整个机制的关键。 正是因为 Feedback 将 $\langle c \rangle$ 变为 $\langle c+1 \rangle$,系统才能区分"第 0 轮的消息"和"第 1 轮的消息"。如果 Feedback 不改变时间戳,$(1,\langle 0 \rangle)$ 的消息经过 Feedback 后还是 $(1,\langle 0 \rangle)$——could-result-in 关系会形成环,系统就永远无法判断 $(1,\langle 0 \rangle)$ 是否已经处理完,因为"总是可能还有新的 $(1,\langle 0 \rangle)$ 从 Feedback 回来"。
分布式实现
论文中的实际实现是分布式的——没有集中式协调器,而是每个 worker 维护一份全局 pointstamp 计数的副本。算子每次变更活跃计数(消费消息、发送消息、获取或 drop capability),都将变更广播给所有 worker。每个 worker 独立地根据汇总后的计数和 could-result-in 关系计算 frontier,判断哪些 notification 可以发出。
对比:为什么不用全局 Barrier?
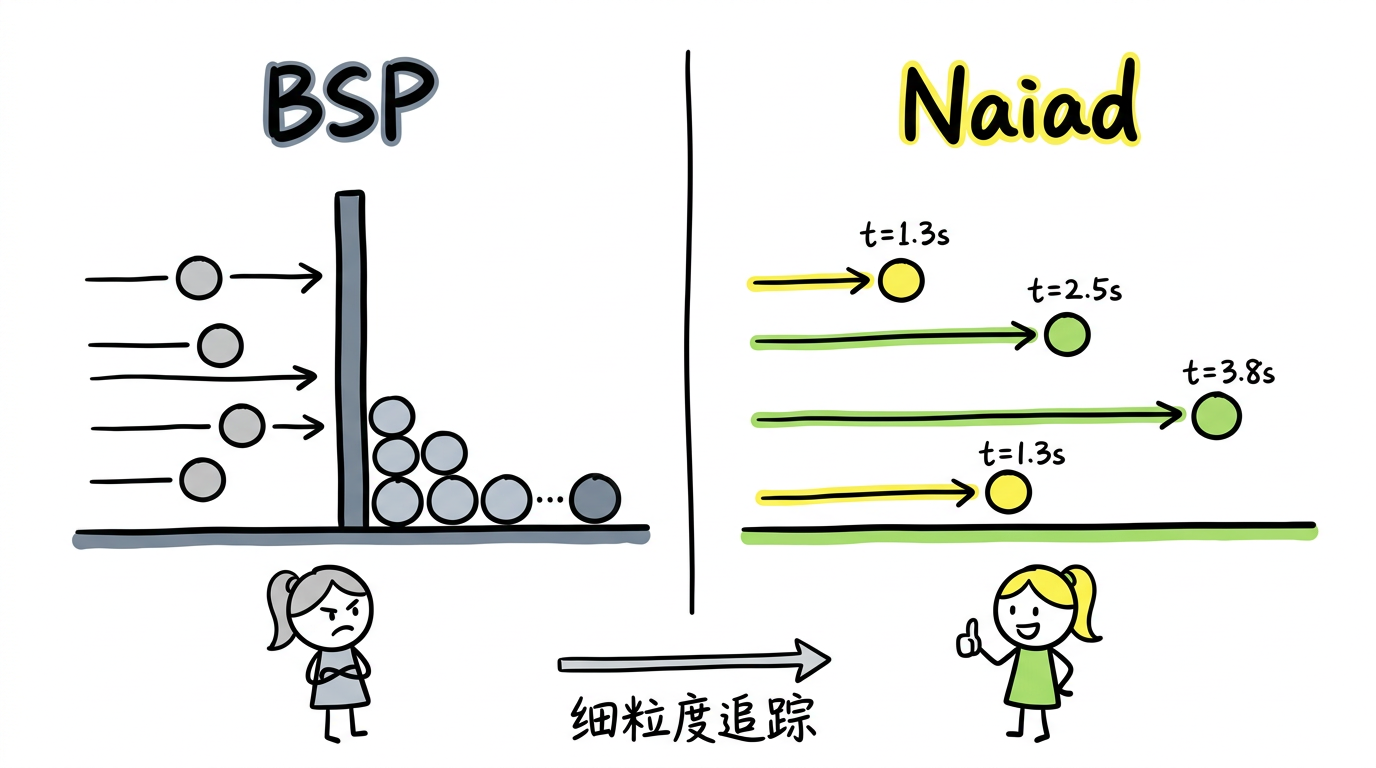
在 Naiad 之前,处理迭代计算最常见的方法是 BSP(Bulk Synchronous Parallel) 模型,也就是 Pregel 的做法。BSP 在每轮迭代之间插入一个全局 barrier:所有 worker 必须完成当前轮次后,才能进入下一轮。
这意味着什么?最慢的 worker 决定整体速度。 即使 99% 的节点在迭代 5 就已经收敛了,也必须等待那 1% 的慢节点完成迭代 5 后才能一起进入迭代 6。
更进一步,BSP 是一个"一次性计算"的模型:加载数据,迭代到收敛,输出结果——没有"持续接收新输入"的概念。如果有新数据到来(比如图中新增了一条边),你只能等当前计算结束后重新启动一轮新的计算。这不是 barrier 的限制,而是模型本身就不支持在计算过程中注入新数据。
Naiad 的模型从一开始就不同。它将"输入批次"(epoch)和"迭代轮数"(循环计数器)编码到同一个时间戳中,使得系统可以在迭代的同时接收新的输入。Pointstamp 追踪是细粒度的——每个算子在每个时间戳上独立追踪进度。已经收敛的节点不需要等待未收敛的节点。当 epoch 1 的数据还在做第 3 轮迭代时,epoch 2 的数据已经可以进入第 0 轮迭代。$(1,\langle 3 \rangle)$ 和 $(2,\langle 0 \rangle)$ 是偏序下不可比较的两个时间戳,系统知道它们之间没有依赖关系,可以并行处理。
这种细粒度追踪不只是性能优化,更是正确性保证。在有环图中,如果没有精确的进度追踪:
- 你可能过早地认为"已经收齐了时间 t 的所有消息",从而产生错误的输出
- 你可能过于保守地等待,导致不必要的延迟
- 你可能完全无法判断迭代是否已收敛
Naiad 的 could-result-in 关系从图的拓扑结构出发,数学上保证了:如果系统说"时间 t 之前不会再有新消息",那就一定不会有。这个保证既不过于激进(不会遗漏消息),也不过于保守(不会做不必要的等待)。
论文中的性能数据
论文的实验验证了这种设计在实际场景中的效果。在一个运行迭代图计算(如 weakly connected components)的实验中,Naiad 在处理实时输入变更时的延迟在毫秒级,而同等任务上 Spark 的批处理延迟在秒级。在吞吐量方面,Naiad 在批处理模式下的性能与 Spark/DryadLINQ 相当,但在需要低延迟迭代更新的场景中优势显著——因为它不需要在每轮迭代之间做全局同步,也不需要将中间结果写入持久化存储。
从论文到实现:Rust 版 timely-dataflow
Naiad 论文的原始实现是用 C# 写的。论文作者之一 Frank McSherry 后来用 Rust 重新实现了 Naiad 的核心思想,这就是开源项目 timely-dataflow。
值得一提的是 Rust 的所有权系统与 capability 机制的契合。在 Rust 实现中,capability 被具象化为一个 Capability<T> 类型——它是一个普通的 Rust 值,拥有所有权语义。当算子持有这个值时,对应 pointstamp 的活跃计数为正;当这个值被 drop(无论是显式释放还是离开作用域自动销毁),活跃计数自动减 1。这意味着进度追踪的正确性由编译器保证——你不可能"忘记释放 capability",因为 Rust 的所有权机制会在值离开作用域时自动 drop 它。
这个 Rust 实现后来成为了 Differential Dataflow 和 Materialize 的底层基础设施,也是下两篇文章的技术起点。
小结
Timely dataflow 的核心贡献是用一个计算模型统一了三种数据处理范式。它的做法是将传统 DAG dataflow 扩展为支持有环图,使得 batch、streaming 和 iterative 计算都成为同一模型的不同实例。
让这种统一成为可能的关键机制是进度追踪协议——基于 pointstamp 和 could-result-in 关系,系统能够在有环图中精确判断"什么时候某个时间点的计算已经完成"。没有这个机制,有环图中的迭代无法收敛,流式数据无法正确输出,不同 epoch 也无法安全地并行。
但 timely dataflow 本身只解决了"何时完成"的问题,并不解决"如何避免重复计算"的问题。当输入数据变化时,timely dataflow 还是需要重新运行整个计算。
有了精确的进度追踪作为基础,我们能不能更进一步——构建一套通用的增量计算框架,当输入变化时只重新计算受影响的部分?
这正是下一篇文章的主题:Differential Dataflow:让计算只做增量。