Ray:为 AI 工作负载设计的分布式 Python 运行时
从一个真实问题说起
假设你在训练一个大模型。你的数据预处理管道需要对 1000 万条文本做 tokenize、清洗、采样;你的超参搜索要同时跑 200 组实验;训练完之后,你需要把模型部署成一个在线服务,自动伸缩应对流量高峰。
这三件事——数据处理、训练调参、模型服务——传统上需要三套不同的基础设施:数据管道用 Spark,超参搜索用自己攒的脚本跑多进程,模型服务用 TensorFlow Serving 或 Triton。三套技术栈,三种抽象,三组运维。
问题不止是工具碎片化。更深层的矛盾是:Python 是 AI 的母语,但 Python 天生是单机的。 GIL 让多线程形同虚设,multiprocessing 的 IPC 开销巨大,而且一旦你想跨机器——对不起,请重写你的代码,用分布式框架的 API 重新表达你的逻辑。
想想 Spark 的用法:你得把思维翻译成 RDD 或 DataFrame 的算子链,你的 Python 函数变成了序列化的黑盒 UDF,在 JVM 和 Python 进程之间来回搬运。Dask 好一些,但调度器是单点瓶颈,而且你仍然需要用它特有的 Delayed / Futures API。
这不应该这么难。一个 Python 函数就是一个计算单元,一个 Python 类就是一个有状态的服务。如果有一种方式,让你在函数定义上加一行装饰器,它就能自动调度到集群上的任意节点执行,返回一个引用让你异步获取结果——那分布式计算就不再是基础设施问题,而只是一个函数调用问题。
这就是 Ray 做的事。
一个最小的例子:感受魔法
先看一段代码,不到 10 行:
| |
@ray.remote 把一个普通函数变成了一个分布式任务。.remote() 提交任务并立即返回一个 ObjectRef(对象引用),ray.get() 阻塞等待结果。就这样——没有 RDD,没有 DataFrame,没有 executor 配置。
但这不是语法糖。这 10 行代码触发了 Ray 底层一整套精密的机械:
- 函数被序列化(pickle),存入全局控制存储(GCS)
CoreWorker构建TaskSpecification,通过 gRPC 向本地Raylet请求 worker 租约Raylet根据资源可用性和数据局部性选择一个 worker 节点- 任务被推送到目标 worker,worker 从 GCS 拉取函数字节码,反序列化参数,执行函数
- 返回值存入 Plasma 对象存储(大对象)或内联在 RPC 响应中(小对象)
ray.get()从本地或远程对象存储拉取结果
一个函数调用,穿越了 5 个组件、3 种 RPC、2 层存储。用户看到的是一行装饰器,系统看到的是一套完整的分布式任务生命周期。
有状态的场景也一样自然:
| |
@ray.remote 加在类上,就变成了一个 Actor——一个有状态的常驻 worker 进程。所有方法调用按序到达同一个进程,状态在方法之间保持。这不是 RPC 框架——是一等公民的分布式对象模型。
What:Ray 是什么
一句话:Ray 是一个把 Python 函数和类原语(function 和 class)提升为分布式计算原语(task 和 actor)的通用框架。
它不是又一个 MapReduce。它的野心更大:提供一个通用的分布式计算底座,让任何 Python 程序——无论是数据处理、模型训练、超参搜索还是在线推理——都能透明地扩展到集群。
技术上,Ray 是一个 Python API + C++ 引擎的混合体。用户面对的是 @ray.remote、ray.get、ray.put 这些极简 API,底层是大量 C++ 构成的分布式运行时,通过 Cython(_raylet.pyx,超过 200KB)桥接 Python 和 C++。
架构上,Ray 由三层组成:
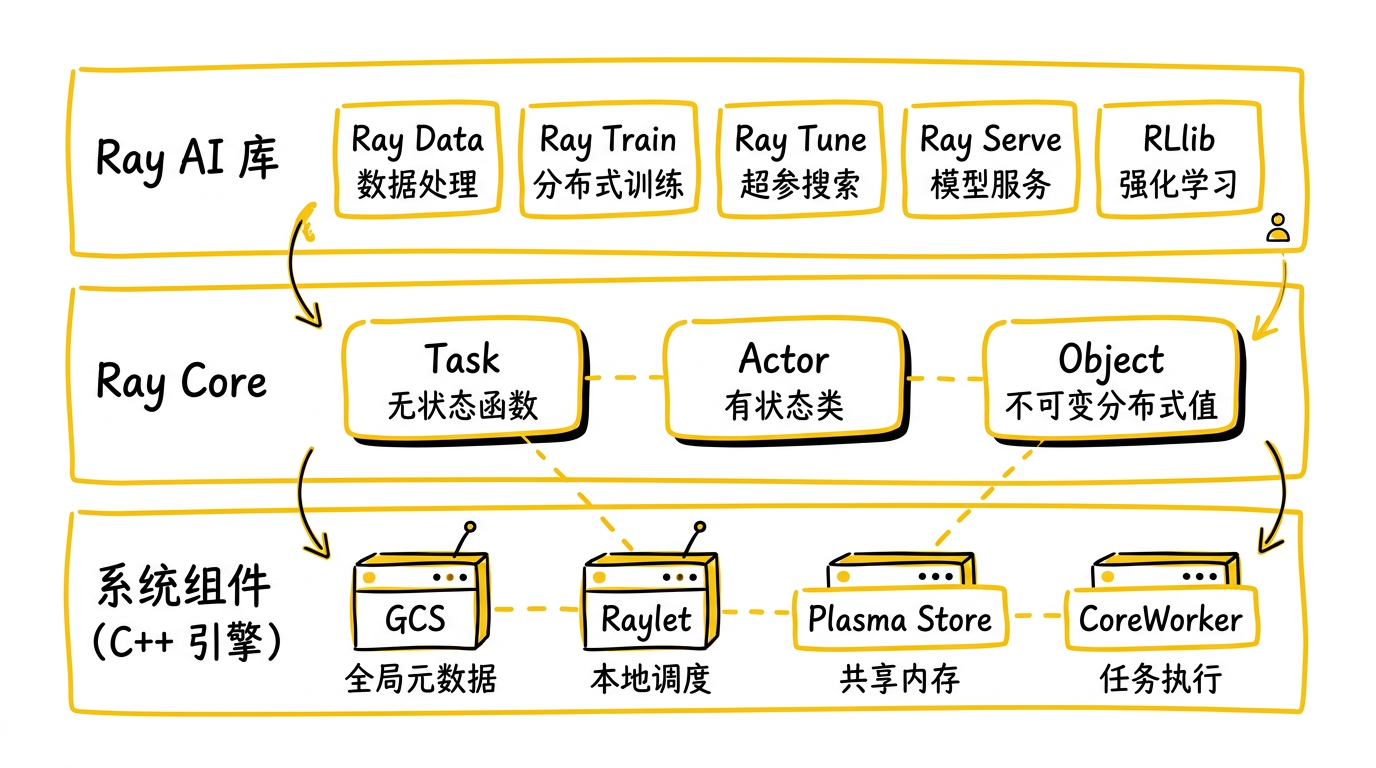
Ray Core——分布式运行时的基座。三个核心抽象:
- Task:无状态的远程函数调用,支持声明 CPU / GPU / 自定义资源需求
- Actor:有状态的远程类实例,方法调用保序执行
- Object:不可变的分布式对象,存储在共享内存(Plasma)中,通过
ObjectRef引用
系统组件——撑起 Core 的分布式基础设施:
- GCS(Global Control Store):集群的"大脑",管理节点、Actor、任务、Placement Group 的元数据
- Raylet:每个节点一个的守护进程,负责本地任务调度和对象管理
- Plasma Object Store:每个节点一个的共享内存对象存储,基于 Apache Arrow 内存格式
- CoreWorker:长期运行的 worker 进程,执行 task 和 actor 方法
Ray AI Libraries——构建在 Core 之上的 AI 工具库:
- Ray Data:分布式数据处理,可处理 TB 级数据集
- Ray Train:分布式训练,支持 PyTorch DDP / DeepSpeed / Horovod
- Ray Tune:超参搜索,20+ 搜索算法
- Ray Serve:模型服务,支持自动伸缩和模型组合
- Ray RLlib:强化学习,50+ 算法
这个分层设计的关键在于:AI Libraries 是 Core 的用户,不是 Core 的特例。 任何人都可以用同样的 Task / Actor / Object 原语构建自己的分布式应用。Ray 不是一个特化的数据处理引擎或训练框架——它是一个通用的分布式计算操作系统。
Why:已有工具哪里不够
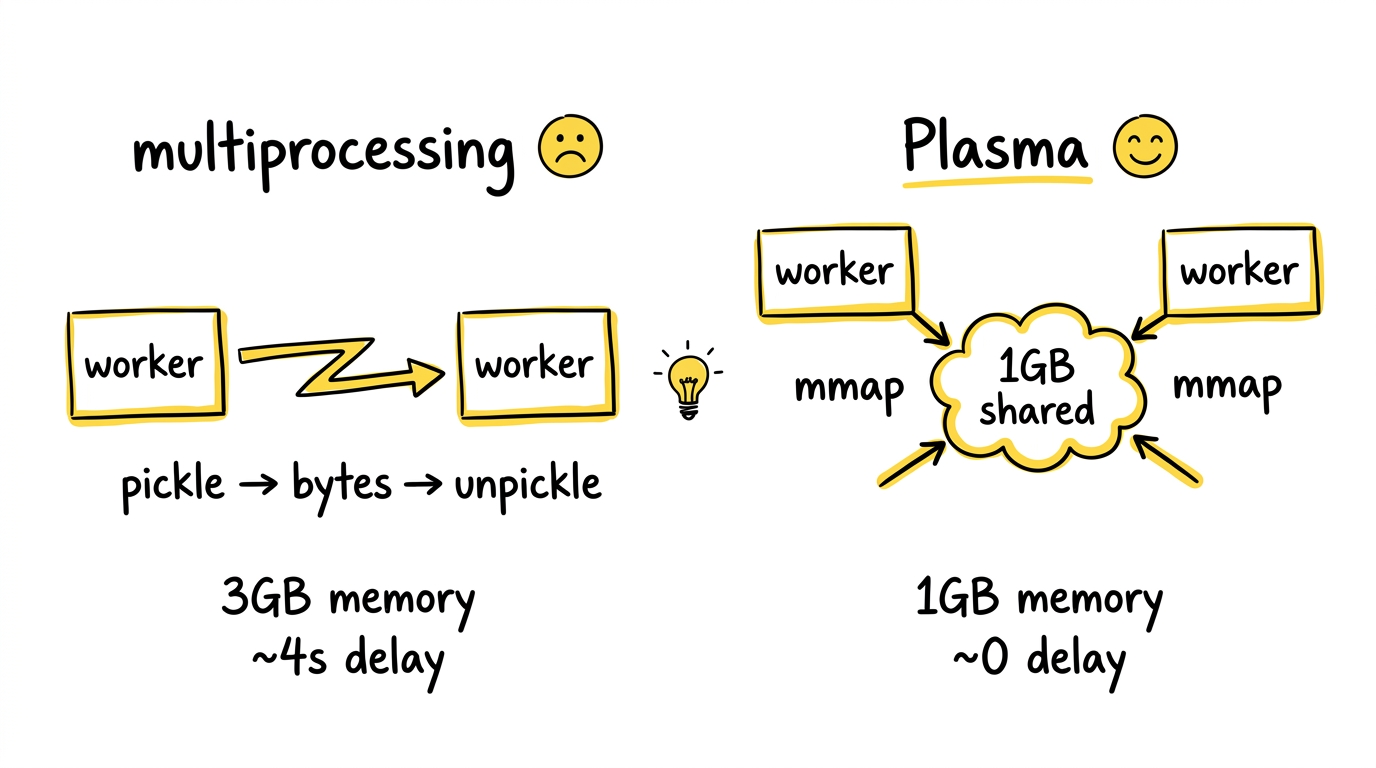
Python 的并行困境
Python 的 GIL 让多线程对 CPU 密集型任务形同虚设。multiprocessing 能绕过 GIL,但每个进程有独立的内存空间,数据传递靠序列化——把一个 1GB 的 NumPy 数组从一个进程搬到另一个,你得先 pickle 成字节流,再 unpickle 回来,内存翻倍,速度砍半。
更致命的是,multiprocessing 止步于单机。跨机器?请自己搭 RPC,自己管连接,自己处理故障。
Ray 的 Plasma 对象存储从根本上解决了这个问题:对象存在共享内存里,多个 worker 进程通过 memory-mapped file 零拷贝访问同一块数据。一个 1GB 的 NumPy 数组,ray.put() 放进去之后,所有同节点的 worker 直接读,不需要任何序列化。跨节点?对象通过 gRPC 传输,但只传一次,然后缓存在本地 Plasma 里,后续访问同样零拷贝。
Spark 的语义鸿沟
Spark 是为 ETL 和 SQL 分析设计的——它的抽象是 DataFrame 和 RDD,它的执行模型是 BSP(Bulk Synchronous Parallel,批同步并行)。这在数据分析场景下工作得很好,但在 AI 场景下处处碰壁:
- 有状态计算:训练一个模型需要在迭代间保持参数状态。Spark 的核心抽象更偏批处理数据流,跨迭代的训练状态通常需要通过缓存、checkpoint 或外部存储显式管理,不像 Ray Actor 那样把长生命周期进程作为一等抽象。
- 异构资源:AI 工作负载同时需要 CPU(数据预处理)和 GPU(模型推理/训练),且两者的比例随任务变化。Ray 的 task/actor 资源声明(
num_gpus=0.3)更贴近 Python 函数和服务化 AI 工作负载的粒度,资源分配可以细到单个函数调用级别。 - 任务粒度:超参搜索需要同时跑几百个独立的训练实验,每个实验持续几分钟到几小时。Spark 的 BSP 模型要求所有 task 同步推进——一个慢 task 拖慢整个 stage。
- Python 开销:PySpark 的每次 UDF 调用都需要在 JVM 和 Python 进程之间序列化/反序列化数据。对于 AI 管道中频繁的模型推理调用,这个开销是致命的。
Ray 的 Actor 模型天然支持有状态计算——一个 Actor 就是一个常驻进程,参数保持在进程内存里。资源声明是细粒度的——@ray.remote(num_gpus=0.5) 意味着一块 GPU 可以同时跑两个任务。调度是异步的——200 个超参实验各自独立推进,互不阻塞。
Dask 的调度瓶颈
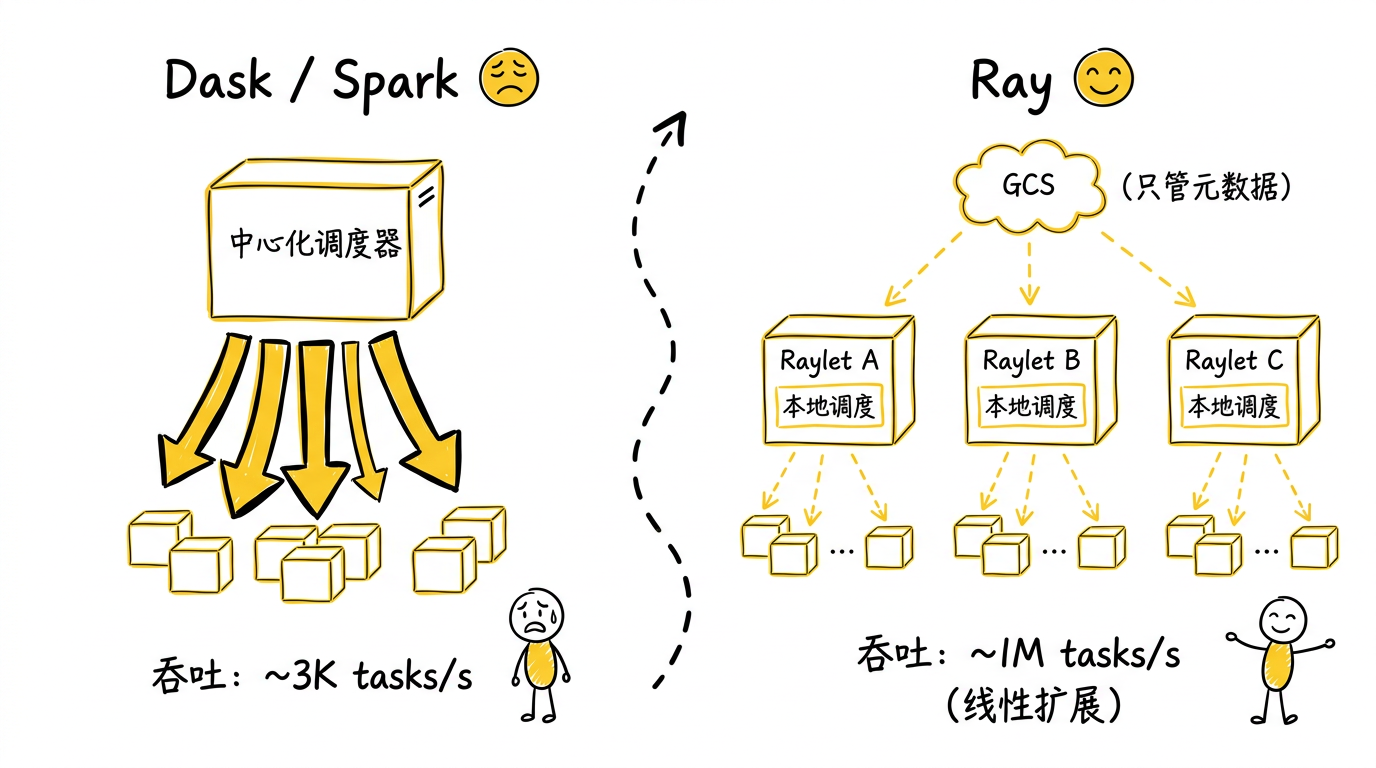
Dask 是 Python 生态中最接近 Ray 的工具——它也试图让 Python 透明地分布式化。但它有一个架构瓶颈:中心化调度器。所有任务的调度决策都由单个进程做出,当任务数量达到百万级时,调度器的 CPU 和内存成为瓶颈。
Ray 的调度是分层的:GCS 管全局元数据,Raylet 管本地调度。每个节点的 Raylet 独立做调度决策,只有跨节点的资源协调才需要 GCS 介入。调度压力不会全部压到单个中心调度器上,具备更好的横向扩展空间。
How:Ray 怎么做到的
层次化 ID 体系:每个对象都知道自己从哪来
分布式系统的第一个问题是:怎么命名一切? 任务、Actor、对象、Job——它们之间有复杂的归属关系(一个 Job 包含多个 Actor,一个 Actor 发起多个 Task,一个 Task 产生多个 Object),你需要高效地编码这些关系。
Ray 的解法是一个层次化的 ID 编码方案:
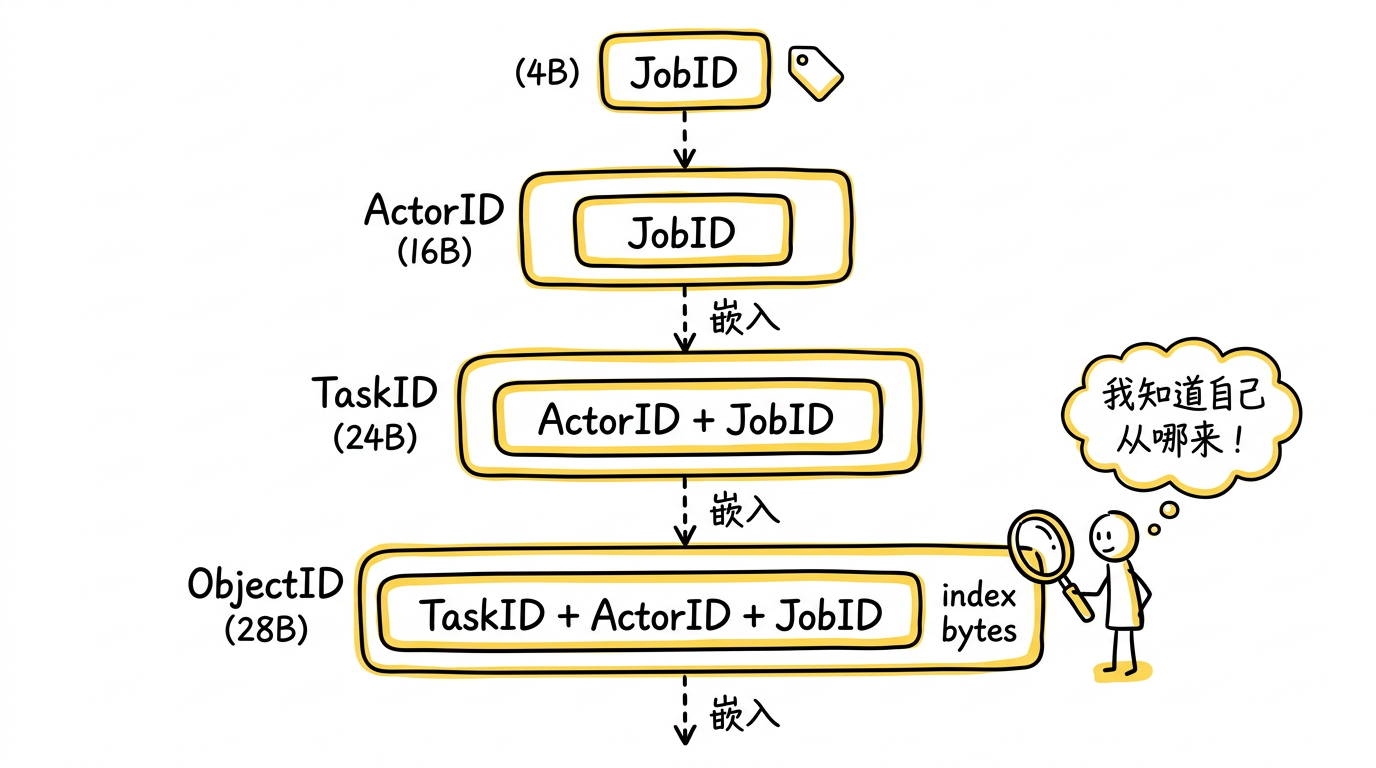
JobID 4 字节,由 GCS 生成;ActorID 16 字节,末尾嵌入 JobID;TaskID 24 字节,末尾嵌入 ActorID;ObjectID 28 字节,末尾嵌入 TaskID,前 4 字节是对象在该任务返回值中的索引。
这个设计的精妙之处:给你一个 ObjectID,你不需要查任何外部存储,就能从中解析出它属于哪个 Task、哪个 Actor、哪个 Job。 一个 28 字节的 ID 编码了整条 lineage 链。这让分布式追踪、引用计数、故障恢复都变得高效——不需要额外的一次 RPC 查询归属关系,ID 本身就是答案。
对于普通函数任务(非 Actor 方法),TaskID 中的 ActorID 部分使用 ActorID::NilFromJob(job_id) 作为 dummy ActorID,其 unique bytes 为 nil 值,末尾仍嵌入 JobID。这样所有类型的任务——普通任务、Actor 方法调用、Actor 创建任务——共享同一套 ID 布局,简化了整个系统的 ID 处理逻辑。
集群拓扑:各组件如何协作
在一个多节点的 Ray 集群中,各组件的物理分布如下:
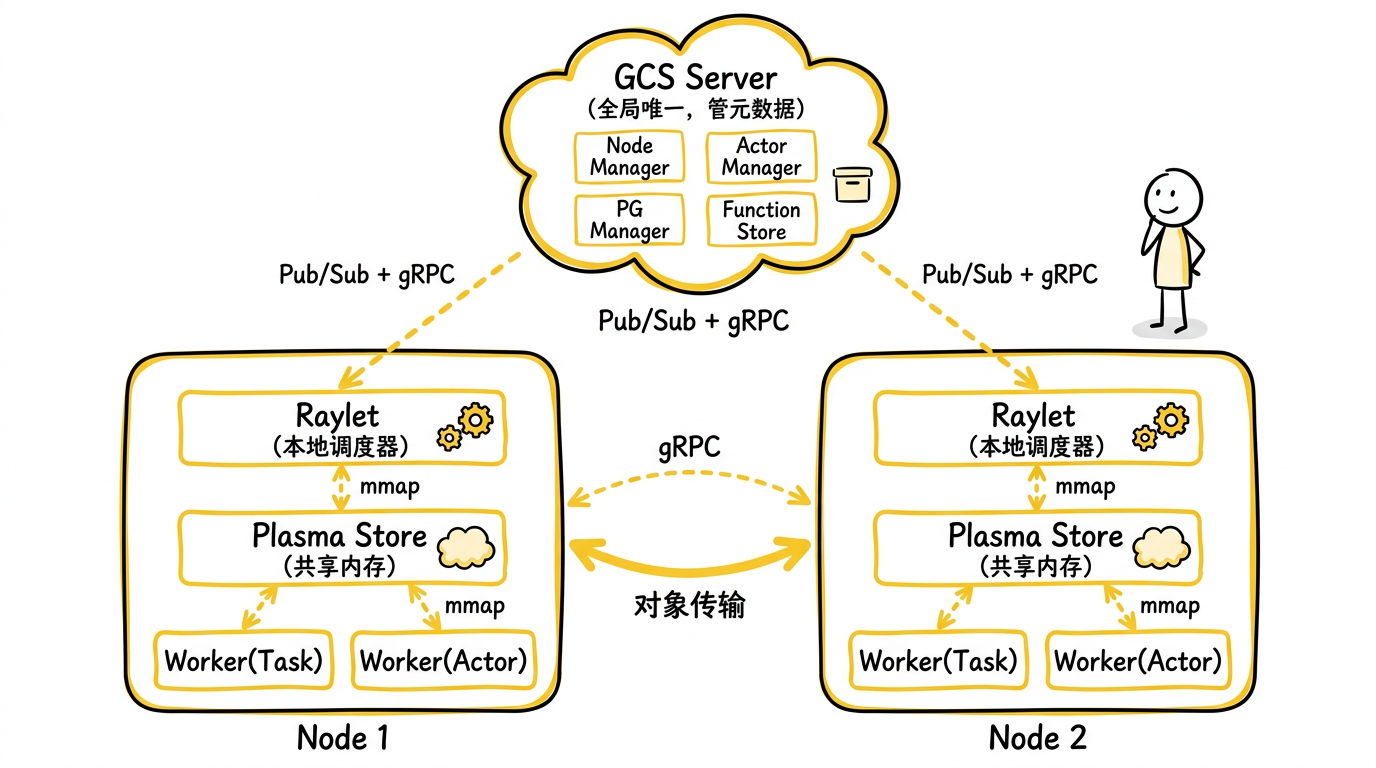
关键数据流:
- 控制面(细线):GCS ↔ Raylet,通过 gRPC + Pub/Sub,传递元数据(节点状态、Actor 生命周期)
- 调度面:CoreWorker → Raylet,
RequestWorkerLeaseRPC - 数据面(粗线):Plasma ↔ Plasma,跨节点对象传输;Worker ↔ Plasma,同节点零拷贝
一个 Task 的完整生命周期:从 .remote() 到 ray.get()
用户写 my_task.remote("Ray") 这一行代码时,下面发生了什么?让我们一步步拆解。
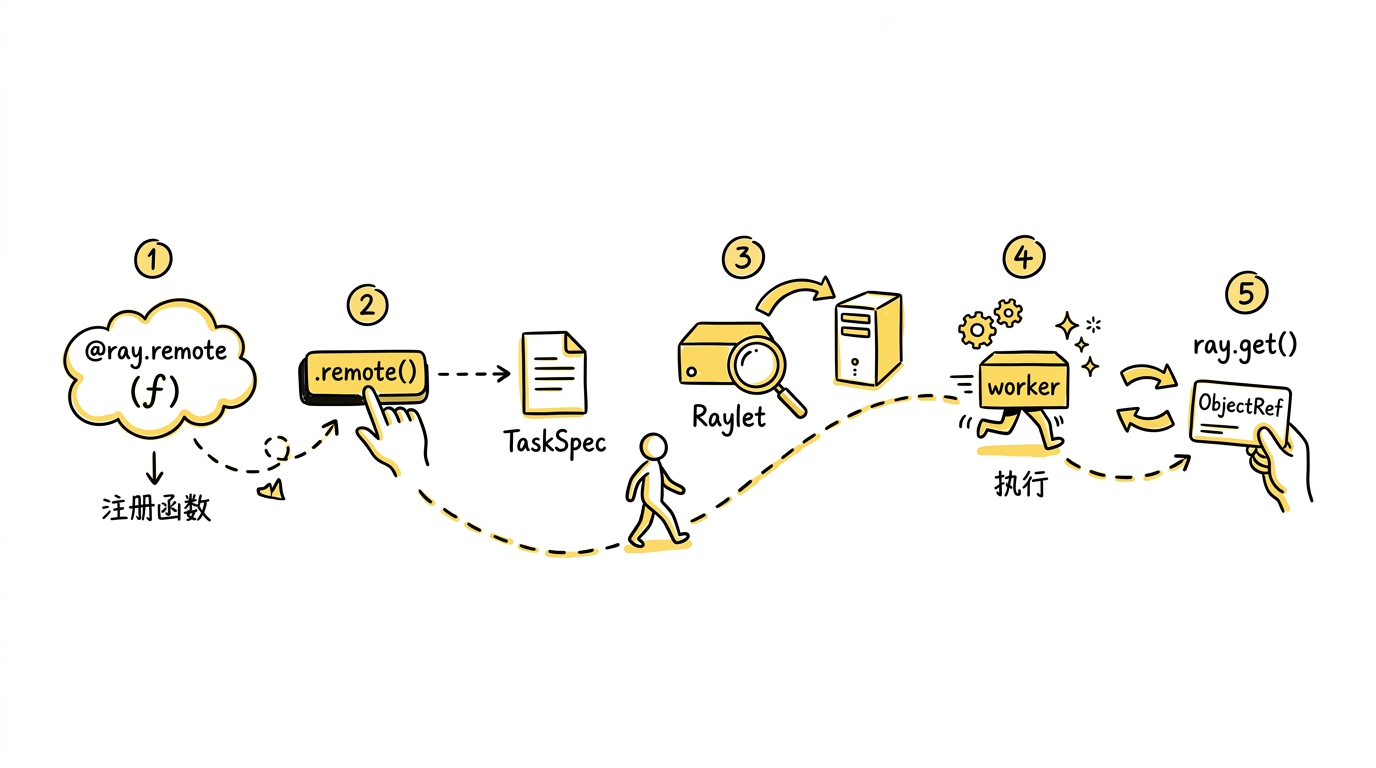
第一步:定义——@ray.remote 的 “记忆”
@ray.remote 包装原始函数,生成一个 RemoteFunction 实例(定义在 python/ray/remote_function.py)。它存储了函数引用和所有用户指定的 Ray 选项(num_cpus、num_gpus 等)。关键的是,函数本身还没有被序列化或发送到任何地方——@ray.remote 只是注册,不执行。
第二步:提交——.remote() 的异步启动
调用 .remote("Ray") 时,真正的工作开始了:
序列化函数:首次调用时,Python 函数被 pickle 成字节流,通过 gRPC 存入 GCS 的 Key-Value 存储。Key 是函数的
FunctionID。这只做一次——后续调用直接复用。处理参数:参数有三种传递方式:
- 引用传递:参数本身是
ObjectRef,直接传递引用 - 内联值传递:小对象(默认 < 100KB)直接 pickle 后嵌入 RPC 消息
- 非内联值传递:大对象先
ray.put()到 Plasma 存储,再传递生成的ObjectRef
- 引用传递:参数本身是
构建 TaskSpecification:包含函数 ID、参数列表、资源需求等全部信息。这个结构体在 C++ 层的
CoreWorker::SubmitTask中构建。异步提交:TaskSpec 被异步提交给
NormalTaskSubmitter。.remote()立即返回ObjectRef,不等待执行。
第三步:调度——Raylet 的资源博弈
NormalTaskSubmitter 先等待所有 ObjectRef 参数就绪(即产生这些对象的上游任务已完成),然后向 Raylet 发送 RequestWorkerLease RPC 请求一个 worker。
Raylet 的调度策略是这样的:NormalTaskSubmitter 首先向本地 Raylet 发送请求——所谓"本地 Raylet"就是调用 .remote() 的进程所在节点上的那个 Raylet(每个节点恰好运行一个 Raylet,CoreWorker 启动时就绑定到它,不需要寻找)。如果任务参数对象在其他节点上,也可能直接发给那个数据局部性更优的 Raylet。Raylet 检查本地资源是否满足任务需求。如果满足,分配一个 worker 返回其地址;如果不满足,Raylet 不会自己转发请求,而是回复一个 spillback 响应,告诉 NormalTaskSubmitter 应该去找哪个节点。NormalTaskSubmitter 收到后,再向目标节点的 Raylet 发起新的 RequestWorkerLease。这个过程一直持续到找到一个有资源的节点为止。
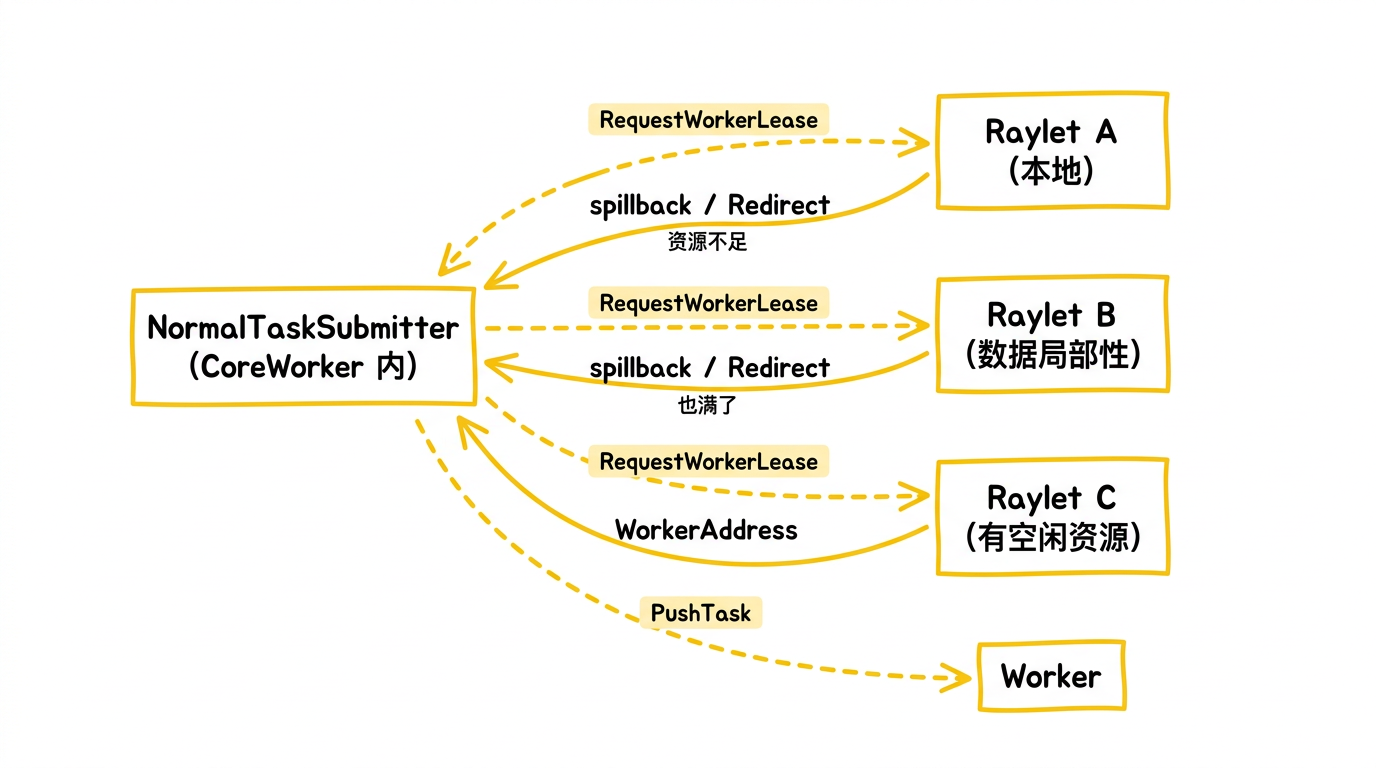
注意:Raylet 之间不直接转发调度请求。调度重定向是"客户端重试"模式——发请求的始终是 NormalTaskSubmitter(CoreWorker 内部),Raylet 只负责告诉它该去哪。这样设计避免了中心化调度的瓶颈和 Raylet 之间的级联调用,每个 Raylet 只做本地决策,保持了调度路径的简洁。
第四步:执行——Worker 的完整工作
拿到 worker 租约后,NormalTaskSubmitter 向目标 worker 发送 PushTask RPC(包含 TaskSpec)。Worker 端的执行流程:
- 从 Plasma 拉取所有按引用传递的参数(跨节点时,先把远程 Plasma 上的对象拉到本地 Plasma)
- 从 GCS Key-Value 存储拉取函数字节码,反序列化
- 反序列化内联参数
- 调用用户函数
第五步:返回——大小对象的分流
函数执行完毕后,返回值的处理取决于大小:
- 小返回值:直接内联在
PushTaskRPC 响应中返回给调用者,存入调用者的 memory store - 大返回值:先存入 worker 本地的 Plasma 对象存储,调用者在
ray.get()时从远程 Plasma 拉取
这个分流策略避免了小对象走 Plasma 的额外开销(共享内存分配、IPC 通知),同时保证大对象不会撑爆 RPC 消息。
ray.get(obj_ref) 内部的逻辑:先查本地 memory store(内联返回值已经在这里了),如果没有则查本地 Plasma,如果还没有则向远程 Plasma 拉取。三层存储,逐级查找。
GCS:集群的"大脑"
GCS(Global Control Store)是 Ray 集群唯一的中心化组件——但它被精心设计为只管元数据,不管数据流。
GCS 管理以下资源:
- 节点管理(
GcsNodeManager):跟踪集群中所有节点的存活状态、资源清单、心跳监控 - Actor 生命周期(
GcsActorManager):创建、调度、重启、死亡——Actor 的状态机由 GCS 全局管理 - Placement Group(
GcsPlacementGroupManager):原子性地预留一组跨节点资源,支持 PACK(紧凑)和 SPREAD(分散)策略 - 任务元数据(
GcsTaskManager):任务状态追踪、lineage 记录(用于故障恢复时重建任务链) - 函数存储:GCS 的 Key-Value 存储保存了所有
@ray.remote函数的序列化字节码
GCS 默认使用内存存储元数据;如果需要 GCS 容错,可以配置 Redis 作为外部持久化后端。它通过 Pub/Sub 机制向各组件推送状态变更——不用轮询,订阅即可。Actor 状态变了?所有订阅者收到通知。节点挂了?GCS 广播。
关键设计决策:GCS 不参与数据面(data plane)的任何操作。 对象存取走 Plasma,任务推送走 CoreWorker 之间的直连 RPC。GCS 只在控制面(control plane)上活跃——创建 Actor、注册节点、记录 lineage。GCS 不在数据面路径上,但默认不具备容错——GCS 数据存在内存中,GCS 进程失败会导致整个集群不可用。生产环境需要配置 HA Redis 作为 GCS 的持久化后端,GCS 重启后才能从 Redis 恢复控制面状态。
Raylet:每个节点的"管家"
Raylet 是运行在每个节点上的守护进程。它的核心职责:
任务调度:Raylet 接收 RequestWorkerLease RPC,根据本地可用资源决定是否分配 worker。调度策略考虑三个因素:
- 资源匹配:任务声明的 CPU / GPU / 自定义资源是否满足
- 数据局部性:任务依赖的对象是否在本节点的 Plasma 中
- Placement Group 约束:是否有 gang scheduling 要求
如果本地资源不足,Raylet 返回 spillback 节点地址,由提交端(NormalTaskSubmitter)重试目标 Raylet。
Worker 进程池:管理 worker 进程的启动、回收、健康检查。Worker 是长期运行的 Python 进程——不是每个 task 启动一个新进程,而是从池中租借一个空闲 worker,执行完毕后归还。这避免了进程启动的开销,也意味着 Python 解释器的预热(import 库等)只做一次。
对象管理:Raylet 通过 LocalObjectManager 跟踪本节点 Plasma 中所有对象的状态——哪些是 pinned 的(不能被驱逐),哪些是 spilled 的(已溢写到磁盘),哪些可以被回收。
整个 Raylet 采用事件驱动架构,基于 Boost.ASIO 实现异步 I/O——单线程事件循环处理所有 RPC,不依赖线程池,能够高效处理上万个并发请求。
Plasma 对象存储:零拷贝的秘密
Plasma 是 Ray 的共享内存对象存储,源自 Apache Arrow 项目。它在每个节点上运行,通过 Unix domain socket 接受客户端连接,用单线程服务所有请求。
核心机制是 memory-mapped file:对象存储在 /dev/shm(tmpfs)上的内存映射文件中。多个 worker 进程可以同时映射同一块共享内存,直接读取对象数据——零拷贝、零序列化。一个 worker 做 ray.put(numpy_array) 写入的 NumPy 数组,另一个 worker 做 ray.get() 读出来时拿到的是完全相同的那块内存。
对象在 Plasma 中是不可变的。创建分两步:先 Create(分配空间),写入数据,然后 Seal(封印)。一旦 Seal,对象永远不会被修改——这是零拷贝安全的前提(如果对象可变,两个 reader 会看到不一致的数据)。
当本地 Plasma 没有所需对象时,系统会自动从远程节点拉取。PullManager(src/ray/object_manager/pull_manager.cc)管理拉取请求,PushManager 管理推送。跨节点的对象传输走 gRPC,传输完成后缓存在本地 Plasma 中作为二级副本(Secondary Copy),供后续访问使用。
对象溢写:内存不够时的优雅降级
真实场景中,对象存储的数据量经常超过物理内存。Ray 的解法是对象溢写(Object Spilling)——当 Plasma 内存压力超过阈值(默认 80%),自动把对象溢写到外部存储(本地磁盘或 S3),需要时再恢复。
溢写架构被精心设计为三层,每层运行在不同线程/进程上,互不阻塞:
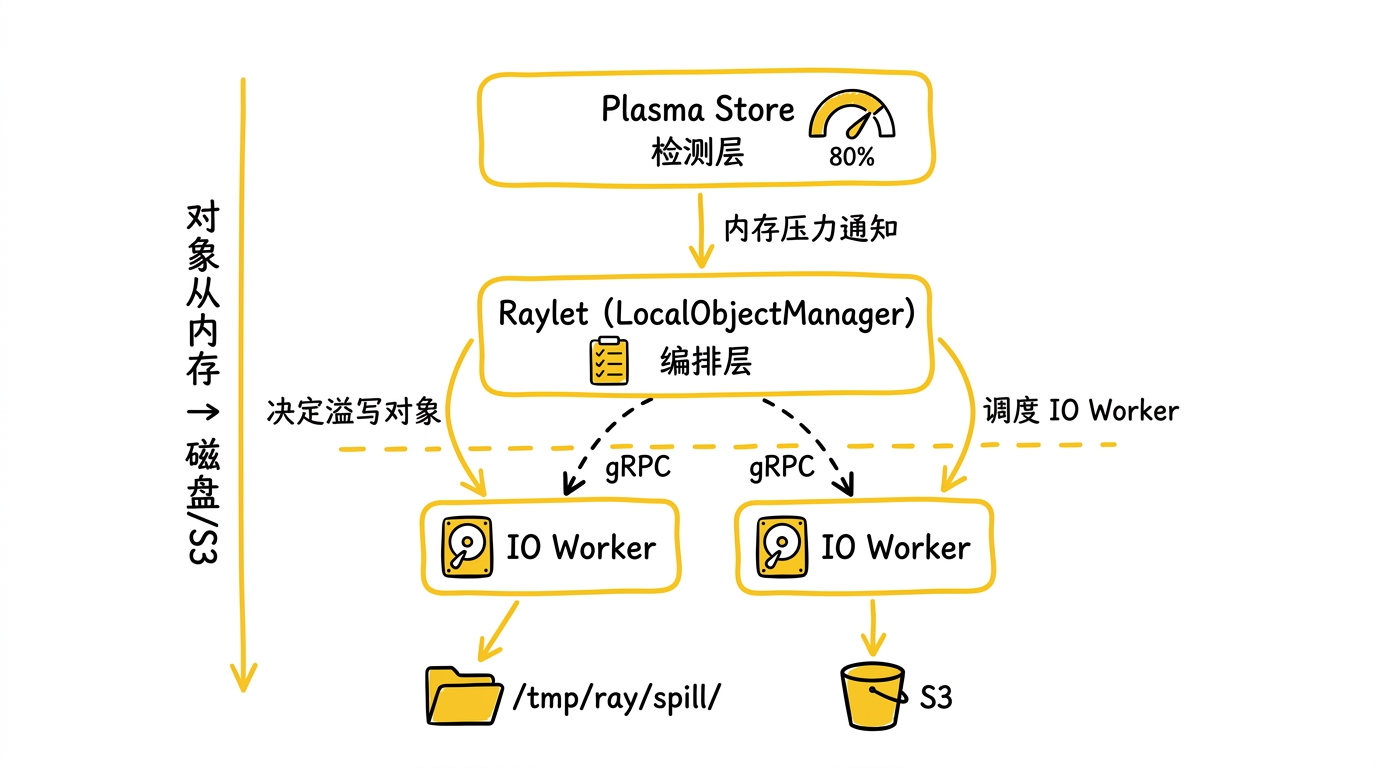
检测层(Plasma Store 线程):
CreateRequestQueue在内存分配失败时触发回调。Plasma Store 是单线程的——如果让它直接做 I/O,所有对象创建都会被阻塞。所以它只做一件事:通知 Raylet “内存紧张了”。编排层(Raylet 主线程):
LocalObjectManager决定溢写什么和什么时候溢写。它采用"乐观批处理"策略:有空闲 IO Worker 就立刻溢写当前可用的对象,如果已经有溢写任务在跑,小批次就推迟——等积攒更多对象一起处理更高效。执行层(Python IO Worker 进程):实际的磁盘/网络 I/O 由独立的 Python 进程执行,通过 gRPC 与 Raylet 通信。这意味着即使 S3 写入很慢,Raylet 的主事件循环也不会被阻塞——心跳、调度、其他 RPC 照常处理。
一个值得细说的设计:对象融合(Object Fusion)。多个对象被合并写入同一个文件,每个对象前面有一个 24 字节的头部(3 个 8 字节字段:owner 地址长度、元数据长度、数据长度)。每个对象通过 URL 中的 offset 和 size 参数独立寻址:
| |
融合文件用引用计数管理生命周期——只有当文件中所有对象都被释放后,文件本身才会被删除。这避免了每个对象一个文件带来的文件系统碎片和 syscall 开销。
溢写还有两道保护线:
- 被动触发:Plasma 分配失败时触发溢写,然后进入"宽限期"(
oom_grace_period_s),等待溢写释放空间。宽限期过后如果仍然不够,启用 fallback allocator——用mmap直接在文件系统上分配内存,比共享内存慢但不会死锁。 - 主动触发:每秒检查一次内存使用率,超过阈值就预防性溢写,不等 OOM。每次有新对象
Seal时也会检查。主动触发确保系统不会突然从"正常"跳到"OOM",而是平滑过渡。
什么时候需要恢复?当有 Worker 需要访问已溢写的对象时——比如用户调用 ray.get(ref) 取值,或者某个任务的参数依赖指向了一个已溢写的对象。如果一个对象溢写后再也没人用它,它就一直待在磁盘/S3 上,等引用计数归零后被删除,永远不会读回内存。
这里需要澄清:Plasma 不是外部存储,而是节点本地的共享内存(基于 /dev/shm),Worker 通过 mmap 零拷贝访问其中的对象。溢写到磁盘/S3 后,数据离开了内存;恢复的最终目标是把数据写入请求方节点的 Plasma,让该节点的 Worker 能通过 mmap 访问。
恢复路径取决于存储类型:
- 本地文件系统:对象只溢写在某个节点的磁盘上。如果请求方就在该节点,直接从磁盘读取写入本地 Plasma。如果请求方是远程节点,则先把请求发到溢写节点,溢写节点从磁盘读取后通过网络直接推送给请求方——不写入溢写节点自己的 Plasma,避免给溢写节点增加内存压力。请求方收到数据后写入自己的 Plasma。
- S3 存储:任何节点都可以直接从 S3 读取,写入本地 Plasma,不需要经过溢写节点中转。
分布式引用计数:不依赖 GC 的对象生命周期管理
在分布式系统中,垃圾回收是一个出了名的难题。对象可能分散在多个节点上,被多个任务引用——什么时候可以安全地删除?
Ray 的解法是 ReferenceCounter(src/ray/core_worker/reference_counter.h),一个线程安全的分布式引用计数系统。它的核心思想是 ownership 模型:每个对象有一个唯一的 owner(创建它的 CoreWorker),owner 负责追踪所有引用并决定对象何时可以被删除。
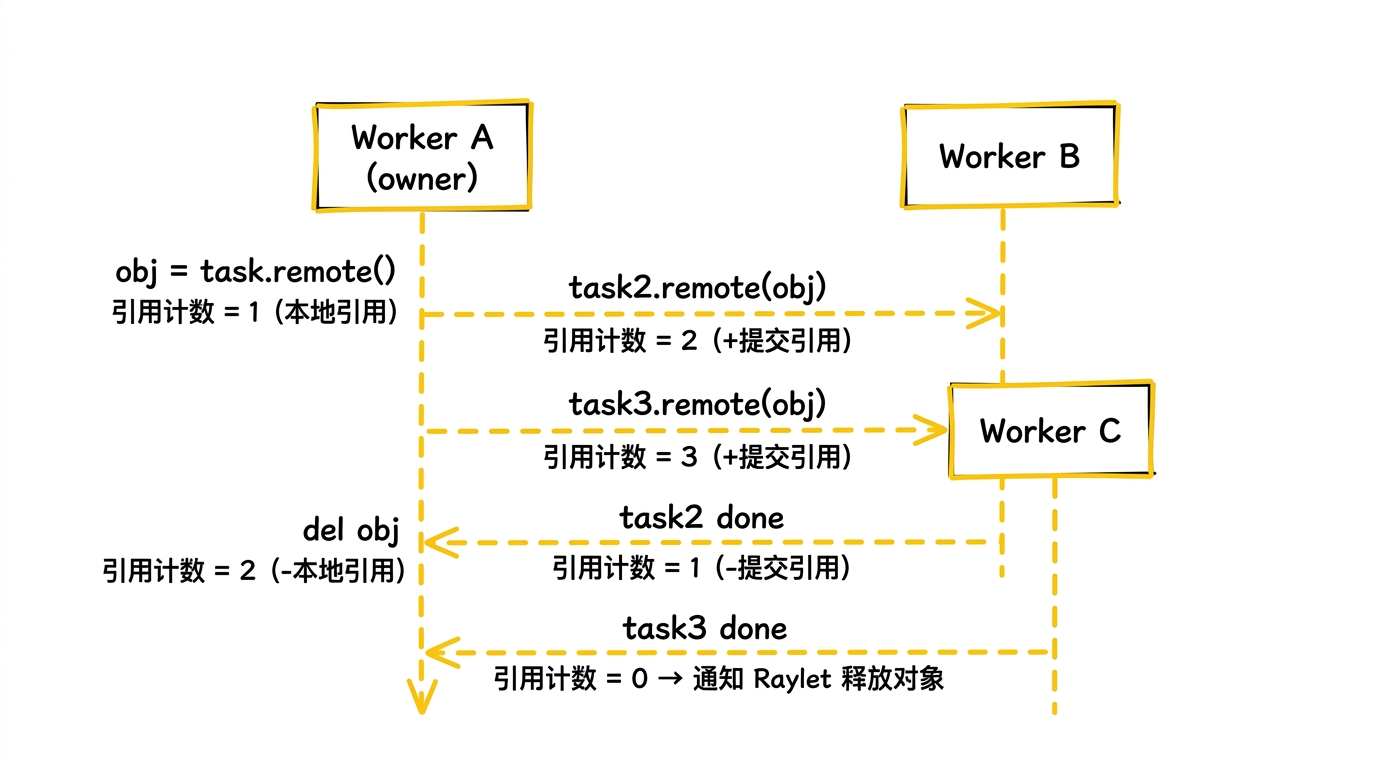
引用的来源有多种:
- 本地引用:Python 代码中持有
ObjectRef变量 - 提交引用:对象被作为参数传给另一个 task,task 完成前引用保持
- 序列化引用:对象被 pickle 进另一个对象内部(嵌套引用)
当所有引用都被释放后(本地引用删除 + 所有下游 task 完成),owner 通过 Pub/Sub 通知 Raylet 释放对象。Raylet 从 Plasma 中 unpin 对象,如果对象已溢写则加入删除队列。
这个系统还支持 lineage pinning:即使对象本身已经被删除,如果它的创建任务的信息还被需要(比如用于故障恢复时重建对象),lineage 信息会被保留。这让 Ray 能在 task 失败时自动重新执行上游任务链来重建丢失的对象。
Actor 的状态机:5 个状态,完整的生命周期
Actor 是 Ray 中复杂度最高的抽象——它是有状态的、长期运行的、可能跨节点恢复的。GCS 用一个 5 状态的状态机管理每个 Actor 的生命周期:
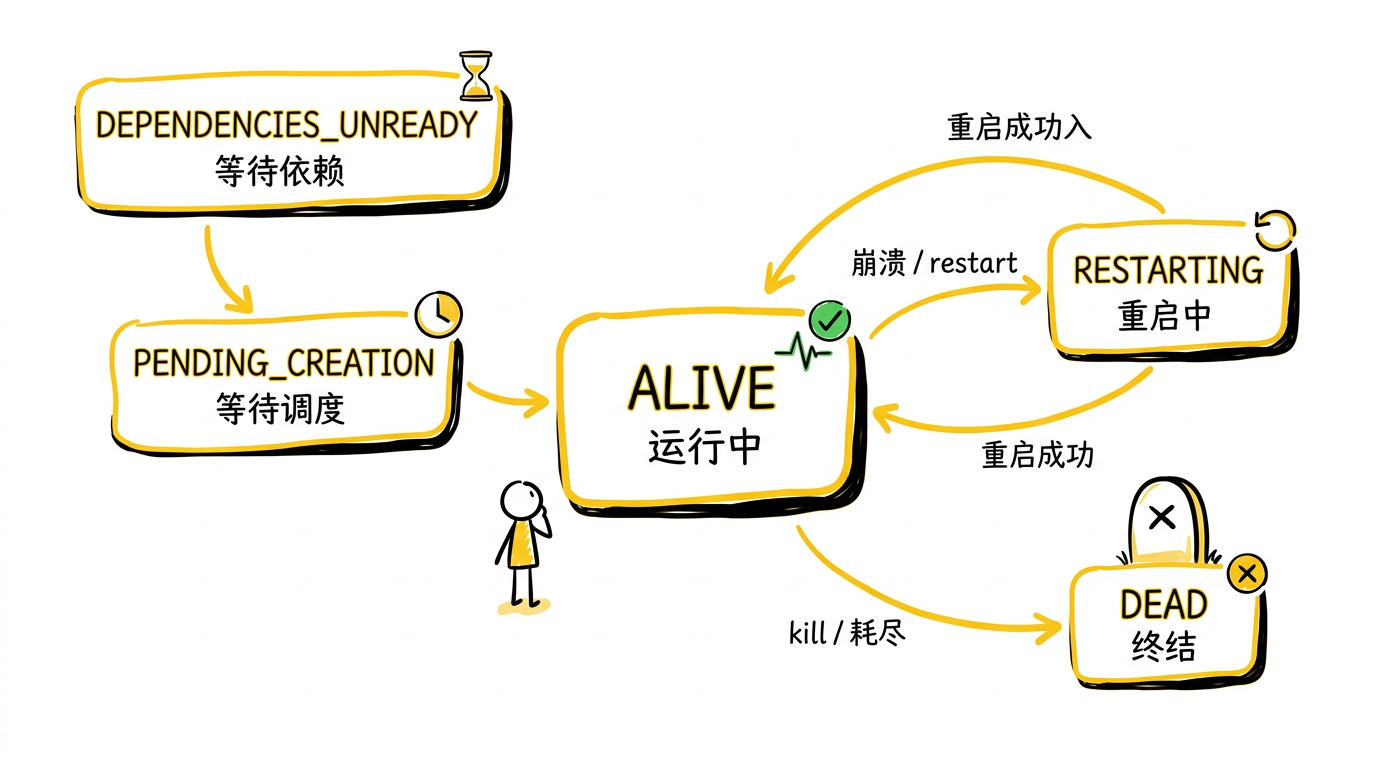
- DEPENDENCIES_UNREADY:Actor 的构造函数参数中有未就绪的
ObjectRef - PENDING_CREATION:依赖就绪,等待 GCS 调度到某个节点
- ALIVE:正在运行,接受方法调用
- RESTARTING:进程崩溃,正在另一个节点重启(如果配置了
max_restarts) - DEAD:终结状态,所有排队的方法调用返回错误
默认单线程 Actor 会串行执行方法调用:同一 Actor handle 上提交的方法按顺序进入 Actor,多个调用者并发提交时,Actor 仍然一次只执行一个方法,状态更新按 Actor 端排队顺序发生。这通过 ActorTaskSubmitter 维护的序列号机制实现。如果启用 async actor、threaded actor 或 concurrency groups(max_concurrency > 1),则方法可以并发执行,顺序语义需要按配置理解。
Detached Actor 是一个特殊变体——它的生命周期不绑定到创建者。普通 Actor 在创建者进程退出时会被 GCS 标记为 DEAD,但 Detached Actor 会一直存活,直到被显式 kill 或集群关闭。这对长期运行的服务(如 Ray Serve 的模型副本)至关重要。
Placement Group:原子性的跨节点资源预留
在分布式训练中,你通常需要保证一组 Actor 被部署到同一台物理机上(数据并行的通信开销),或者相反——分散到不同机器上(容错)。Placement Group 就是为此设计的。
| |
Placement Group 的关键语义是原子性(atomicity):要么所有 bundle 都成功预留,要么全部失败。这就是 gang scheduling——不会出现预留了一半资源、另一半等不到的死锁。
GCS 的 GcsPlacementGroupManager(src/ray/gcs/gcs_placement_group_manager.cc,47KB)负责全局的 Placement Group 调度。两种策略:
- PACK:尽量把所有 bundle 放在同一个节点上,减少网络通信
- SPREAD:把 bundle 分散到不同节点上,提高容错性
一些值得展开的设计决策
为什么 Worker 是长期运行的进程,而不是每 Task 一个进程?
启动一个 Python 进程的代价不容小觑:fork + exec + Python 解释器初始化 + import 常用库(NumPy、PyTorch),这个过程可能花费数秒。如果每个 task 启动一个新进程,当你提交 10000 个轻量 task 时,进程启动的总开销可能远超实际计算时间。
Ray 的 Worker Pool 预先启动一组 worker 进程,task 执行完毕后 worker 不退出,而是归还到池中等待下一个任务。只有当并发需求超过当前 worker 数量时,才会按需启动新 worker(受 max_workers 限制)。
这也解释了为什么 Ray 的函数序列化策略是"首次调用时存入 GCS,后续直接拉取"——worker 可以缓存已经反序列化的函数,同一个函数的多次调用不需要重复 unpickle。
为什么参数传递要区分"内联"和"非内联"?
小对象走 RPC 内联传递,大对象走 Plasma 对象存储——这个分流策略背后的权衡是:
- 小对象:如果把一个 100 字节的整数也放进 Plasma,你需要一次 IPC 通知、一次 memory map、一次 IPC 确认,开销远大于数据本身。直接塞进 RPC 消息更快。
- 大对象:如果把一个 1GB 的 tensor 内联到 RPC 消息里,protobuf 的序列化和 gRPC 的缓冲区管理会崩溃。放进 Plasma 后只传递引用(28 字节的 ObjectID),接收端从本地 Plasma 零拷贝读取。
阈值是可配置的,默认约 100KB。这个数字是经验值——在典型网络和 IPC 延迟下,小于此值内联更快,大于此值走 Plasma 更优。
为什么 GCS 选择了 Pub/Sub 而不是轮询?
在大规模集群中(数百节点、数百万对象),如果每个 Raylet 每秒向 GCS 轮询"有没有新的 Actor 创建?有没有节点挂掉?",GCS 的 RPC 压力会是 O(节点数 × 事件类型数 × 频率)。
Pub/Sub 把这个关系反转:组件只订阅自己关心的事件频道,GCS 在状态变更时推送通知。一个节点挂掉,只有持有该节点上 Actor 引用的组件会收到通知——其他节点完全不受影响。这把 GCS 的负载从 O(N²) 降到了 O(affected)。
什么时候用 Ray,什么时候不用
适合 Ray 的场景:
- 你的 Python 程序需要跨多个 CPU 核心或多台机器并行——Ray 让你不需要重写代码
- 你在做 ML/AI 工作——训练、调参、推理、数据预处理都有对应的 Ray 库
- 你有异构资源需求——同时需要 CPU 和 GPU,需要细粒度资源分配
- 你需要有状态的分布式服务——Actor 模型比裸 RPC 框架更自然
- 你的工作负载是异步的——成百上千个独立任务需要并发执行
不适合的场景:
- 纯 SQL 分析——Spark / DuckDB / Polars 在这个赛道上更成熟
- 小规模数据、单机场景——
multiprocessing甚至asyncio就够了,Ray 的运行时本身有初始化开销 - 实时流处理——Flink / Kafka Streams 的流处理语义(窗口、watermark、exactly-once)更完善
- 你的团队没有 Python——Ray 的 C++ 和 Java API 存在但远不如 Python 成熟
一些真实的数字:OpenAI 用 Ray 做 ChatGPT 的 RLHF 训练;Uber 用 Ray 做 Michelangelo 平台的 ML 基础设施;Spotify 用 Ray 做推荐系统的特征计算;Ant Group 用 Ray 支撑大规模图计算和强化学习。
谁在用 Ray,用来做什么
理论讲完了,看看真实世界里 Ray 在干什么。
LLM 训练:OpenAI
OpenAI 用 Ray 协调 ChatGPT 的分布式训练——数千块 GPU 的任务调度、数据分发、容错恢复。Greg Brockman 的原话:“Ray was by far the winner among distributed computing solutions.” 核心价值是:研究人员本地写的代码,不用改就能提交到千卡集群跑。
大规模批量推理:ByteDance
ByteDance 用 Ray Data 对 200TB 多模态数据做离线推理。模型超过 100 亿参数,单 GPU 装不下,按层切分到 3 块 GPU 上。Ray Data 的流式执行让 CPU 预处理和 GPU 推理同时进行,不需要把 200TB 中间结果全量写磁盘——这类 CPU/GPU 流水线不是 Spark 的强项。
参考:How ByteDance Scales Offline Inference with Multi-Modal LLMs to 200TB Data
异构集群省成本:Uber & Netflix
Uber 把训练管道拆成 CPU 节点(数据加载)和 GPU 节点(梯度计算),成本降低 50%。Netflix 做了同样的事——把数据预处理 offload 到独立 CPU 节点,训练吞吐量翻了 3-5 倍。本质是:用 Ray 的异构调度让 GPU 不再等 CPU。
参考:Elastic Deep Learning with Horovod on Ray - Uber Blog、Heterogeneous Training Cluster with Ray at Netflix
ML 平台:Spotify
Spotify 的 ML 基础设施原来只支持 TensorFlow。迁移到 Ray 之后,PyTorch、XGBoost、PyG(图神经网络)都能跑。一个 GNN 推荐系统从开发到上线 A/B 测试只用了 3 个月。
模型在线服务:蚂蚁集团
全球最大的 Ray 生产集群——24 万核。双十一峰值 137 万 TPS。用 Ray Serve 做 serverless 模型服务:用户提交模型代码,平台自动部署、隔离、弹性伸缩。
参考:How Ant Group Uses Ray to Build a Large-Scale Online Serverless Platform
LLM 推理引擎:vLLM
vLLM 多节点推理默认使用 Ray 作为分布式执行后端。2 节点 16 卡的典型配置:tensor parallel = 8(节点内),pipeline parallel = 2(跨节点)。Ray Serve LLM 在 vLLM 之上增加了 prefix-aware routing(TTFT 降低 60%)、多 LoRA 热切换、自动伸缩。
参考:vLLM Distributed Inference and Serving、Announcing Native LLM APIs in Ray Data and Ray Serve
RLHF 训练:OpenRLHF
70B 模型做 RLHF 需要 4 个模型同时在线(actor / critic / reward / reference)。OpenRLHF 用 Ray 把它们分布到不同的 GPU 组——16 卡跑 vLLM 生成、16 卡跑 Actor 训练、16 卡跑 Critic 训练。Ray 负责模型间的数据协调和 GPU 资源动态分配。
参考:OpenRLHF: An Easy-to-use, Scalable and High-performance RLHF Framework
自动驾驶数据管道:Applied Intuition
TB 级传感器日志(激光雷达、摄像头、雷达)经过 CPU 坐标变换后送入 GPU 做目标检测。Ray Data 的 streaming + 异构调度让 CPU 和 GPU worker 独立伸缩。
参考:Ray Summit 2025 - Applied Intuition: Powering Large-Scale Batch Inference Pipelines
一个共同的模式
这些案例的共同点是:Ray 几乎从不单独做"计算"本身——训练用 PyTorch/DeepSpeed,推理用 vLLM,数据处理用 Arrow/Pandas。Ray 做的是把这些东西粘在一起、放到集群上跑、处理故障、管理资源。
它是分布式计算的"操作系统层",不是"应用层"。
回到开头
1000 万条文本的预处理、200 组超参实验、弹性伸缩的模型服务——这些任务的共同点是:它们本质上都是 Python 函数和类,只是需要在多台机器上并行运行。
Ray 做的事情,是让这个跨越变得几乎透明:@ray.remote 让函数变成 task,让类变成 actor;层次化 ID 让每个对象都能追溯 lineage;两阶段调度让任务高效地找到合适的节点;Plasma 对象存储让数据零拷贝共享;对象溢写让内存不够时优雅降级而不是崩溃;引用计数让垃圾回收在分布式环境下正确工作。
这就是 Ray 的核心主张:分布式计算不应该要求你用另一种语言思考。
函数就是 task,类就是 actor,变量就是 object。你写的是 Python,跑的是集群。工具应该适应程序员的思维方式,而不是反过来。