当 AI Agent 需要新鲜上下文:CocoIndex,一个声明式增量数据索引框架
从一个真实问题说起

假设你在一家中型技术公司工作,团队在搭一个面向客户的 Support Agent。公司的产品文档、FAQ、故障排查指南分散在 Confluence、Google Docs 和一个 Git 仓库里,总共几千篇,每周都在更新。客户的问题五花八门:用的是业务术语而不是技术关键词(“为什么我的订单消失了"而不是 soft_delete),涉及跨文档的上下文(计费规则在一篇文档里,退款流程在另一篇),有时候是模糊的概念性提问(“你们支持多租户吗”)。这种场景下 grep 和关键词搜索基本没用——用户的用词和文档里的术语对不上。
技术方案是 RAG:把所有文档分块(chunk),生成向量嵌入(embedding),存入向量数据库。客户提问时,用语义相似度检索最相关的块,拼入 LLM 的上下文窗口生成回答。
第一版很快就跑起来了。但问题马上来了。
产品文档不是静态的。新功能上线要加文档,旧功能下线要归档,故障排查指南随着事故复盘不断补充。每天有几十次更新。产品经理刚更新了退款政策,但 Agent 回答客户的还是上周的版本——因为索引是昨晚定时任务全量重建的。客户按照过时的步骤操作,发现不对,投诉升级。更糟的是,全量重建要处理几千篇文档,调用嵌入 API 花费不少钱和时间,你不敢跑太频繁。
好,你决定做增量更新。于是你开始在 Python 脚本里加逻辑:记录每个文件的 mtime,跟上一次比较,只处理变化的文件。听起来简单?接着你发现一篇已下线功能的文档被归档删除了,但它对应的 chunks 还留在向量数据库里,Agent 继续引用已经不存在的功能来回答客户——这些"幽灵数据"比没有数据更危险。你得追踪每个文件产生了哪些 chunks,删除文件时把对应的 chunks 也删掉。然后你发现,改了 chunk 大小之后,所有文件都应该重新分块——但 mtime 没变,你的增量逻辑跳过了它们。
于是你开始加版本号、加 hash、加状态数据库。一周之后你发现,你写的增量同步逻辑比你的业务逻辑还复杂,而且还有 bug。
这个问题不是你的能力问题。它是一个系统性的缺失:当数据在持续变化,而你需要让下游的索引始终保持新鲜,谁来帮你管理这个"源 → 目标"的同步?
传统的 ETL 工具(Airflow、Dagster)是面向批处理的——定时全量跑,每次重头来过。CDC 工具(Debezium)面向数据库行级变更,但它不理解你的应用逻辑——它不知道一篇文档变了之后,应该重新分块、重新嵌入、删除旧 chunks、插入新 chunks。自己写增量逻辑?那就是上面描述的痛苦。
CocoIndex 就是为了解决这个问题而生的。
一个最小的例子:感受差异
在展开 CocoIndex 的设计之前,先看一个最小任务:把一个目录下的 Markdown 文件分块、生成嵌入、存入 PostgreSQL(pgvector),并在文件变化时保持同步。
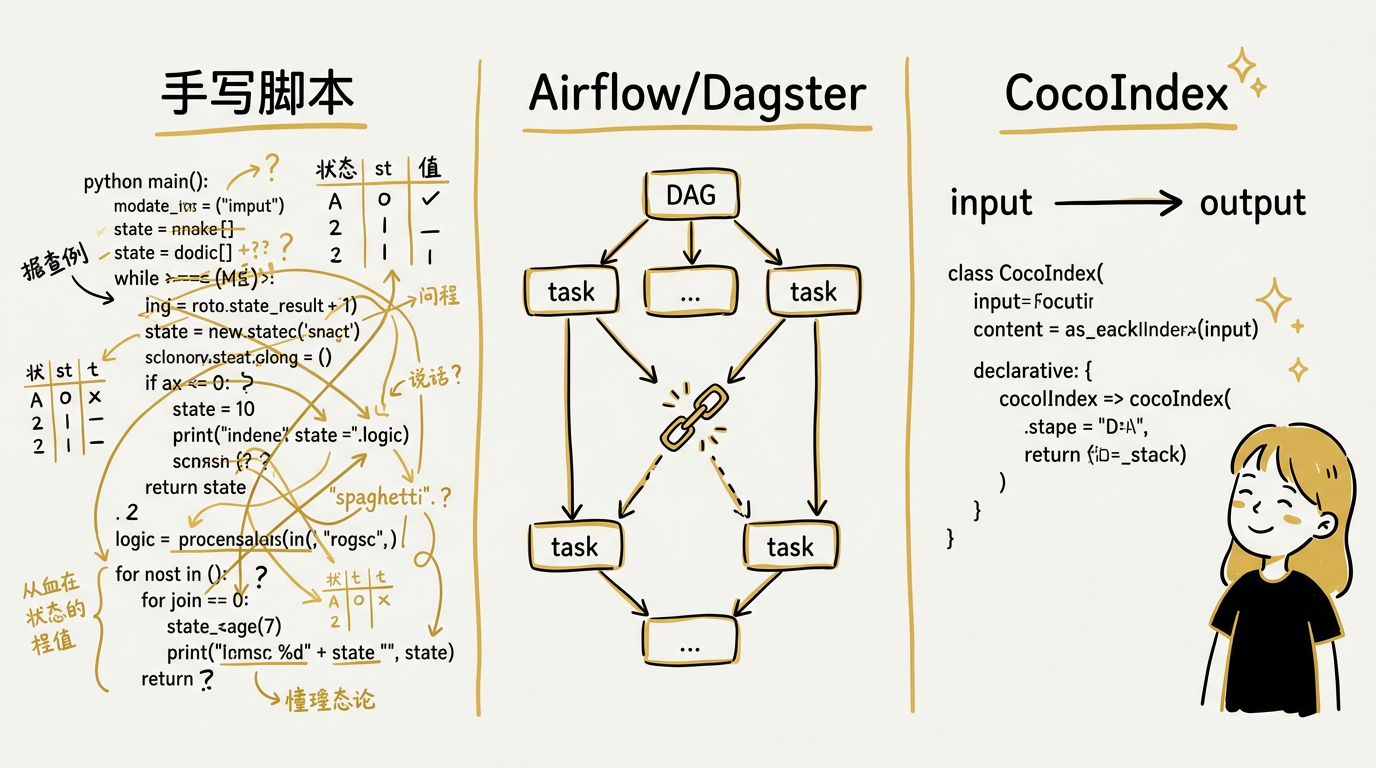
手写 Python 脚本的做法是:扫描目录,对每个文件读取内容,调用分块函数,对每个 chunk 调用嵌入模型,写入数据库。要做增量,你得自己维护一张状态表,记录每个文件的 hash 和它产生的 chunk IDs。文件修改时,查出旧 chunks 删除,插入新 chunks。文件删除时,查出并删除它的所有 chunks。代码改了 chunk 策略时……你的状态表不知道这件事,只能手动清库重跑。
用 Airflow/Dagster 好一些:你可以把分块、嵌入、写入定义成 DAG 的 task,加上调度和重试。但增量的核心问题没变——你仍然需要自己在 task 里写"哪些文件变了"的判断逻辑,仍然需要自己管理"文件删除时清理下游数据"的关联。DAG 管的是任务编排,不是数据同步。
CocoIndex 的写法是声明式的:
| |
注意这段代码里没有任何增量逻辑。没有 mtime 比较,没有状态表,没有 “if changed then reprocess”。你只是声明了"每个文件应该产生哪些 chunks”,CocoIndex 引擎自动处理剩下的一切:
- 文件没变?
memo=True让函数直接跳过,不重新执行 - 文件修改了?只重新处理这个文件,旧 chunks 自动删除,新 chunks 自动插入
- 文件被删了?它的组件(component)不再存在,引擎自动清理它拥有的所有目标状态
- 代码改了(比如 chunk_size 从 2000 改成 1000)?函数的代码 hash 变了,memo 缓存失效,所有文件自动重新处理
三者的本质区别不在代码量,而在于谁负责维护"源到目标"的一致性。手写脚本和 DAG 工具把这个责任推给了开发者;CocoIndex 把它收进了引擎。你只需要声明"目标应该长什么样",引擎负责让现实和声明保持一致。这就像 React 之于前端——你声明 UI 应该是什么状态,框架负责最小化地更新 DOM。
What:CocoIndex 是什么
一句话:CocoIndex 是一个声明式增量数据索引框架,让你用"声明目标状态"的方式构建数据管道,引擎自动处理增量同步、缓存失效和数据清理。
它的核心主张印在项目首页上:Your agents deserve fresh context. 你的 AI Agent 值得拥有新鲜的上下文。
技术上,CocoIndex 是一个 Python API + Rust 引擎的混合体。用户面对的是 Python 的 async/await 接口,底层是一个由多个 Rust crate 构成的增量计算引擎,通过 PyO3 暴露 Python 绑定。Rust 层处理组件树管理、memo 指纹计算、状态持久化(LMDB)、目标状态协调(reconciliation)这些计算密集的核心逻辑;Python 层负责用户函数、连接器(connector)、嵌入模型调用这些需要灵活性的部分。
这个架构选择和我们之前分析过的 Daft 类似——计算密集用 Rust,灵活性留给 Python——但解决的问题完全不同。Daft 是一个查询引擎,优化的是"一次计算如何尽可能快";CocoIndex 是一个索引框架,优化的是"连续多次计算之间如何尽可能少做"。
三个关键词定义了 CocoIndex 的独特性:
- 声明式:你不写"如果文件变了就重新处理"的命令式逻辑,你只声明"每个文件应该产生什么目标数据",引擎自动做 diff 和 reconciliation
- 增量:通过 memo 指纹(hash(inputs) + hash(code))和组件所有权追踪,只重新处理变化的数据,跳过不变的部分
- 全链路:从源数据变更检测、函数级缓存、到目标状态的 create/update/delete,整条链路由引擎统一管理
Why:传统方案哪里不够
批处理太慢、太贵
最朴素的做法是定时全量重建索引:每隔几小时扫描所有文件,重新分块,重新嵌入,重新写入。
这在数据量小的时候可以接受,但随着规模增长,成本曲线是陡峭的。假设你有 10000 个文档,每次全量重建需要调用嵌入模型处理所有 chunks——即使其中 99.9% 没有变化。如果你用的是付费嵌入 API(OpenAI、Cohere),每次全量重建的费用和延迟都是线性增长的。更关键的是延迟:全量重建可能需要几十分钟到几小时,这意味着你的 Agent 在这段时间里使用的是过时的上下文。
对于 AI Agent 来说,上下文的新鲜度直接影响决策质量。一个正在帮用户排查 bug 的 coding agent,如果它查到的代码索引还是两小时前的版本,它可能会基于已经被修复的代码给出错误的建议。
自建增量逻辑很脆弱
很多团队的第一反应是"加一层缓存":记录每个文件的 hash,变了才重新处理。但真正的增量同步远比这复杂:
删除问题:文件被删除了,你怎么知道它在向量数据库里留下了哪些 chunks?你需要一张映射表,记录 file → [chunk_ids]。但如果你的分块逻辑变了(比如 chunk_size 从 2000 改成 1000),同一个文件产生的 chunk 数量变了,旧的映射关系就失效了。
代码变更问题:你改了嵌入模型从 MiniLM 换成 BGE,所有 chunks 都应该重新嵌入。但你的增量逻辑只看文件的 mtime 或 content hash——文件没变,它不会触发重新处理。你需要把"代码版本"也纳入缓存 key,但手动管理这个 key 极其容易遗漏。
级联问题:一个文件变了,它的 chunks 变了,但如果你还有一层"跨文件去重"或"跨文件关系图",变化会沿着依赖链传播。手写这种级联失效逻辑几乎不可能正确。
这些问题不是 corner case——它们是任何认真做增量的系统都会遇到的核心难题。CocoIndex 把这些复杂度收进了框架。
现有工具解决的是不同的问题
Airflow / Dagster 是工作流编排工具。它们管的是"任务 A 完成后触发任务 B",不管"任务 A 的输入数据有哪些行变了"。你可以在 Airflow 的 task 里写增量逻辑,但框架本身不会帮你。
Debezium / CDC 工具 解决的是"数据库行级变更捕获"。它们能告诉你数据库表里哪些行变了,但它们不理解你的应用逻辑。“一行文档变了”→“需要重新分块、重新嵌入、删除旧 chunks、插入新 chunks"这条链路,CDC 不管。
LlamaIndex / LangChain 提供了 RAG 的构建块(splitter、embedder、retriever),但它们本质上是库(library),不是框架(framework)。它们帮你做了一次性的 indexing,但不帮你管理"当源数据变化时,如何最小化更新索引”。
CocoIndex 填的是这个空白:一个在应用逻辑层面理解"源 → 变换 → 目标"关系的增量同步引擎。
How:CocoIndex 怎么做到的
核心模型:TargetState = F(SourceState)

CocoIndex 的整个设计围绕一个等式:
| |
你的代码 Transform 是一个纯函数(或者说,一个可被 memo 的函数)——给定相同的输入,产生相同的输出。CocoIndex 引擎的职责是:当 SourceState 变化时,以最小的代价让 TargetState 重新等于 Transform(SourceState)。
这个模型的优雅之处在于,它把所有的增量复杂度从用户代码中移除了。用户只需要写那个 Transform 函数——声明目标应该长什么样——引擎负责 diff、cache、reconciliation。
组件树与所有权追踪
这是 CocoIndex 最核心的设计,也是它能"自动清理幽灵数据"的根本原因。为了讲清楚,先从用户代码出发,看看引擎在背后做了什么。
回到前面那个最小例子:
| |
假设 sourcedir 下有三个文件:readme.md、api.md、guide.md。当你调用 app.update_blocking() 时,引擎内部发生了什么?
第一步:构建组件树
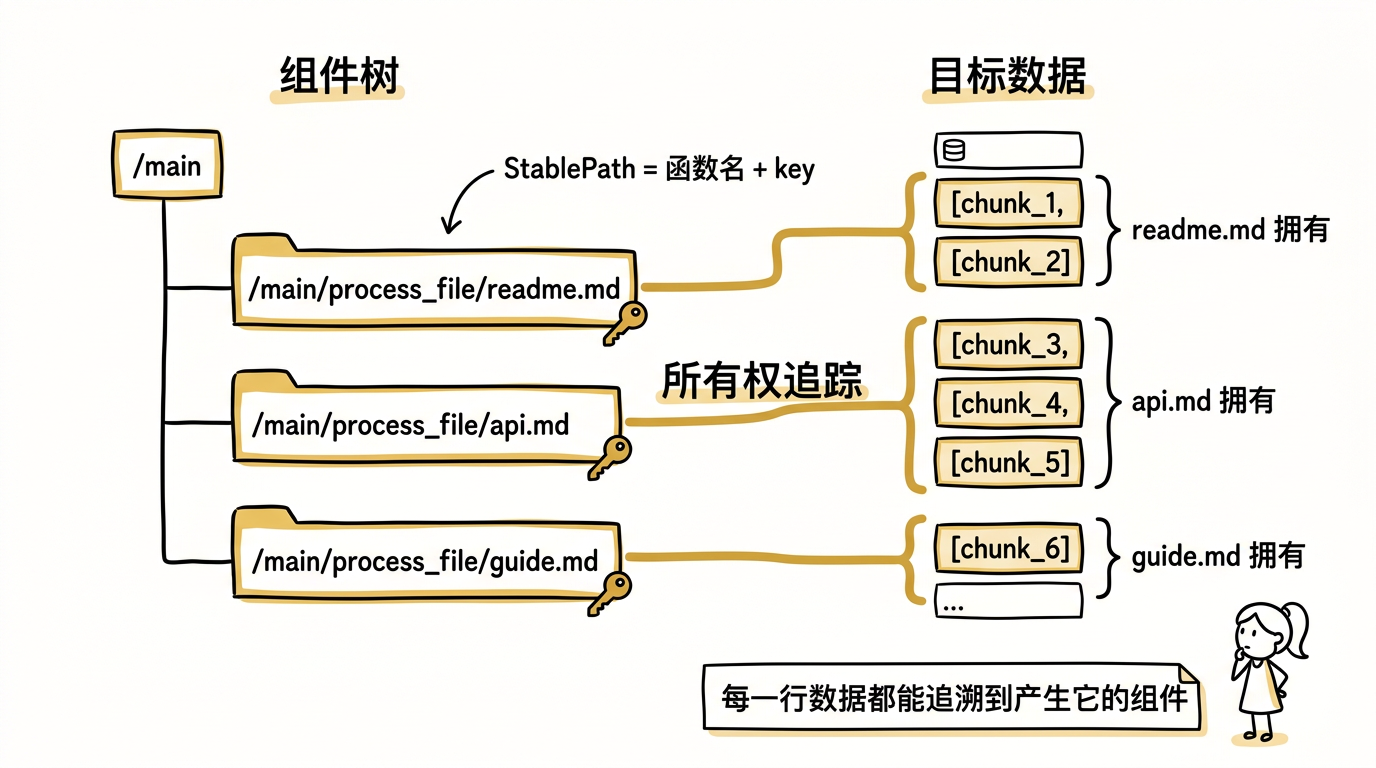
每一个 @coco.fn 函数的调用都会创建一个组件(Component)。mount_each 对文件列表的每个元素调用 process_file,所以会创建三个子组件。每个组件有一个稳定路径(StablePath),由函数名 + 元素的 key 拼成:
| |
路径里的 key(readme.md、api.md)来自文件名,不是数组下标。这很重要:即使文件列表的顺序变了(比如新加了一个文件排在前面),每个文件对应的组件路径不变。这和 React 列表渲染时给每个元素加 key 是同一个思路。
第二步:执行函数,记录"谁产生了什么"
每个子组件执行 process_file 函数。假设 readme.md 分成了 2 个 chunk,api.md 分成了 3 个 chunk,guide.md 分成了 1 个 chunk。每次调用 table.declare_row(...) 时,引擎在内部记录:这一行是哪个组件声明的。
执行完成后,引擎在 LMDB 中存储了一张所有权表,大概长这样:
| |
这张表就是所有权的核心——每一行数据都能追溯到产生它的那个组件。
第三步:文件被删了,会发生什么?
现在用户删除了 readme.md。下一次 app.update_blocking() 时:
main()重新执行,mount_each遍历当前文件列表,只有api.md和guide.md了,不再为readme.md创建子组件。引擎比较"这次有哪些子组件"和"上次有哪些子组件":
1 2 3上次:[readme.md, api.md, guide.md] 这次:[api.md, guide.md] 差异:readme.md 消失了引擎查所有权表,找到
/main/process_file/readme.md拥有[chunk_1, chunk_2]。引擎向 PostgreSQL 发送
DELETE FROM docs WHERE id IN (chunk_1, chunk_2)。清理所有权表中
/main/process_file/readme.md的条目。
整个过程中用户没有写任何删除逻辑。 引擎的推理链条是:文件不存在了 → 组件不再被创建 → 组件拥有的数据应该被删除。这就是"所有权追踪"的全部含义。
第四步:文件被修改了呢?
如果 api.md 被修改了(比如加了一段内容),流程是这样的:
mount_each仍然为api.md创建子组件,路径还是/main/process_file/api.md。memo=True检查发现文件内容的 hash 变了,缓存失效,process_file重新执行。重新分块后,
api.md现在产生了 4 个 chunk(之前是 3 个)。函数声明了[chunk_3', chunk_4', chunk_5', chunk_7]。引擎比较本次声明和上次存储的目标状态,做 diff:
1 2 3 4上次:[chunk_3, chunk_4, chunk_5] 这次:[chunk_3', chunk_4', chunk_5', chunk_7] 操作:UPDATE chunk_3→chunk_3', UPDATE chunk_4→chunk_4', UPDATE chunk_5→chunk_5', INSERT chunk_7所有权表更新为新的 chunk 列表。
而 guide.md 没变,memo 指纹匹配,process_file 根本不执行,它的 chunks 也不会被碰。
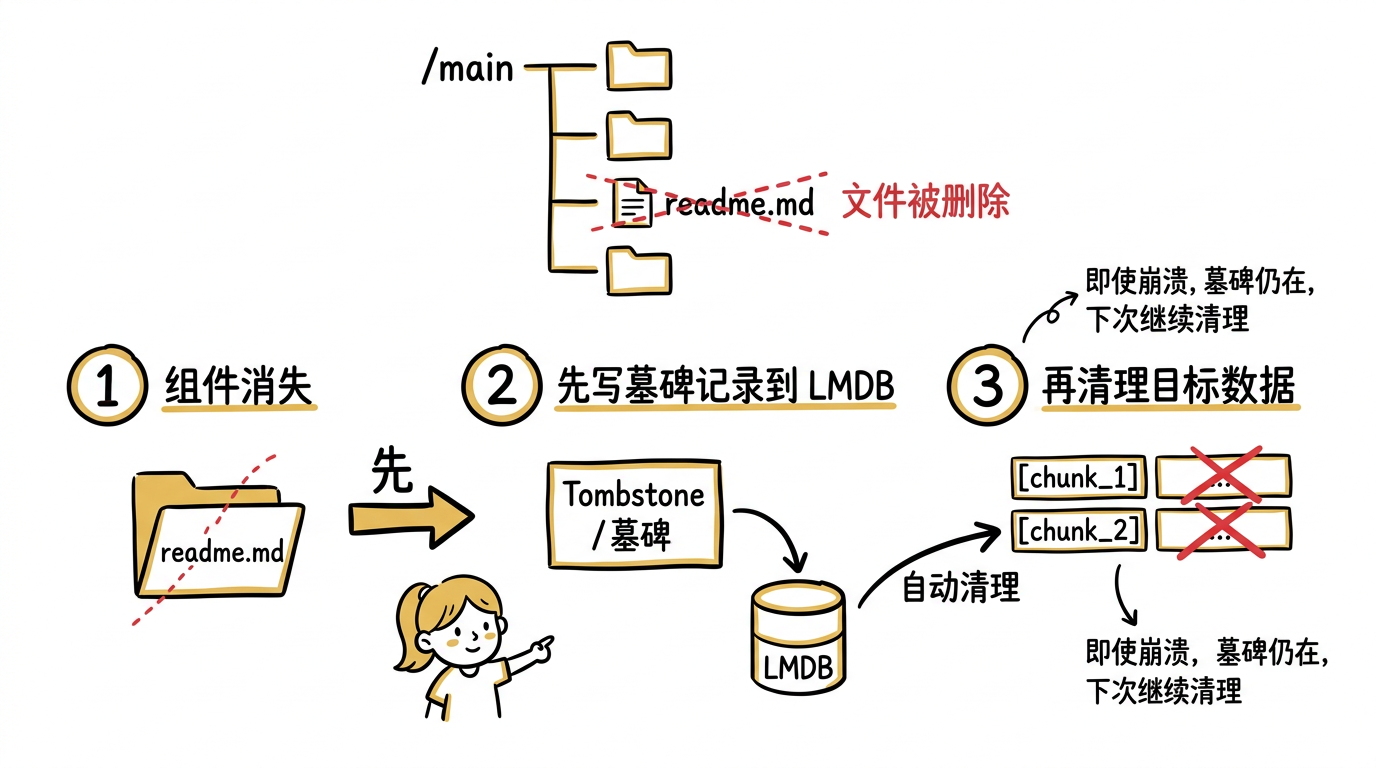
为什么要用墓碑(Tombstone)?
上面第三步"删除 readme.md 的 chunks"描述的是理想情况。但如果删除到一半进程崩溃了怎么办?比如 chunk_1 已经删了,chunk_2 还没删。
CocoIndex 的做法是:发现组件消失后,不立即执行删除,而是先写一条墓碑记录到 LMDB。墓碑的意思是"这个组件需要被清理"。然后再根据墓碑执行实际的删除操作。如果删除中途崩溃,墓碑还在,下次重启时引擎会重新扫描墓碑,继续未完成的清理。
墓碑是整个机制的崩溃恢复安全网——确保不会因为进程崩溃而留下"删了一半"的脏数据。
Memo 指纹:不只是输入 hash
CocoIndex 的缓存机制比简单的 “input hash → output” 更精细。当你在函数上标注 @coco.fn(memo=True) 时,引擎计算的 memo 指纹包含两部分:
- 输入指纹:函数参数的 hash
- 代码指纹:函数本身的 hash(通过
logic_tracking机制)
这意味着:
- 文件内容没变 → 输入指纹不变 → 跳过执行(即使你重启了进程)
- 文件内容变了 → 输入指纹变了 → 重新执行
- 你改了
chunk_size参数 → 代码指纹变了 → 所有文件重新执行 - 你换了嵌入模型 → 嵌入模型注册为
ContextKey且detect_change=True→ 相关指纹变化 → 重新嵌入
第三点尤其重要。传统的缓存只看输入数据,不看处理逻辑。你换了模型但数据没变,缓存命中,索引没更新——这是一个隐蔽的 bug。CocoIndex 通过把代码纳入指纹来避免这类问题。
指纹的持久化使用 LMDB——一个嵌入式键值数据库。LMDB 的特点是读性能极高(无锁,mmap),非常适合"频繁检查缓存是否命中"的场景。指纹以组件路径为 key 存储,即使进程重启,缓存依然有效。
目标状态协调(Reconciliation)
当一个组件执行完成后,它声明的目标状态需要和"上一次运行的目标状态"做对比,产生具体的数据库操作。这个过程叫 reconciliation:
| |
这个 diff 发生在引擎内部,不需要用户参与。用户的代码只有 declare_row(...)——声明"这一行应该存在且内容是这样的"。至于它是新增、修改还是不变,引擎自动判断。
Reconciliation 还支持**附件(Attachments)**的概念。比如 table.declare_vector_index(column="embedding") 声明了一个向量索引——这个索引是表的附件,当表的数据变化时,附件也会相应更新。
崩溃恢复:重启等于一次增量更新
一个自然的问题是:CocoIndex 进程挂了或者重启了怎么办?
答案是:重启之后的行为和正常的增量更新完全一致,不需要任何特殊的恢复流程。 这是因为所有关键状态都持久化在 LMDB 中:
- Memo 指纹在 LMDB 里 → 重启后引擎遍历所有组件,逐一检查指纹。文件没变的,指纹匹配,直接跳过;文件变了的,指纹不匹配,重新处理。和正常增量更新的逻辑完全一样。
- 所有权索引在 LMDB 里 → 引擎知道哪些目标状态属于哪个组件,不会因为重启而丢失这层关系。
- 墓碑在 LMDB 里 → 如果上一次运行中途崩溃,一个组件的删除操作只执行了一半(比如墓碑写入了但目标状态还没清理),重启后 GC 扫描会发现这个墓碑,继续执行未完成的清理。
- StablePath 是内容派生的 → 同一个文件无论在哪次运行中,都会产生相同的组件路径,memo 缓存自然命中。
换句话说,CocoIndex 没有"冷启动"和"热运行"的区别。每次 update() 调用都是同一个流程:遍历组件树 → 检查指纹 → 跳过没变的 → 处理变了的 → reconcile 目标状态 → 清理墓碑。第一次运行是"全部都是新的",重启后是"大部分都命中缓存",逻辑路径完全相同。这种设计的好处是没有额外的恢复代码路径——恢复就是正常运行,不存在"恢复模式的 bug"这种东西。
上下文与资源管理
AI 管道中有些资源是全局共享的——数据库连接池、嵌入模型实例、配置参数。CocoIndex 用 ContextKey[T] 和 @coco.lifespan 来管理这些资源:
| |
detect_change=True 是一个精妙的设计:它告诉引擎"这个资源的值会影响计算结果"。如果你把嵌入模型从 MiniLM 换成 BGE,EMBEDDER 的变化会被检测到,所有依赖它的组件的 memo 指纹会失效,触发重新计算。而数据库连接池 PG_DB 设为 detect_change=False(默认值),因为换一个数据库连接不应该导致重新嵌入。
Live 模式:从批处理到持续同步
CocoIndex 不止于一次性的批处理。当源数据支持变更通知时(比如文件系统的 inotify、Kafka 的消费组),CocoIndex 可以进入 Live 模式——持续监听变化,增量更新。
| |
| |
在 Live 模式下,引擎不会在处理完所有文件后退出,而是保持运行,监听文件系统事件。当一个文件被修改时,只有对应的组件被重新执行,其他组件的缓存不受影响。这让你的索引可以在亚秒级别保持新鲜。
Rust 引擎:为什么不是纯 Python
CocoIndex 的增量逻辑——指纹计算、组件树遍历、状态存储、reconciliation——全部在 Rust 层实现。这不是"用 Rust 重写就更快"的教条,而是有具体的技术原因:
指纹计算是热路径。每次运行时,引擎需要对所有组件计算 memo 指纹来决定是否跳过。这涉及大量的 hash 计算(blake2)和 LMDB 查询。在 10000 个文件的场景下,纯 Python 实现的开销可能比实际的数据处理还大,抵消了增量的收益。
组件树管理需要精确的内存控制。组件树用弱引用(weak reference)追踪子组件的存活状态,用 RAII 管理组件的生命周期——组件被 drop 时自动触发清理。这些模式在 Rust 中是零成本的,在 Python 中则依赖 GC 和 __del__,不可靠且有性能开销。
项目的 benchmark 数据印证了这一点:在 10000+ 文件的语料库上,Rust 引擎比纯 Python 实现快 30-80 倍。CPU 密集型工作负载(指纹计算、状态对比)的加速比高达 80 倍,I/O 密集型工作负载(文件读取、数据库写入)也有 17-23 倍的提升。
连接器生态:不止向量数据库
CocoIndex 的目标状态不限于向量数据库。它提供了 17+ 种连接器,覆盖了 AI 应用常见的后端:
| 类别 | 连接器 |
|---|---|
| 关系数据库 | PostgreSQL、SQLite、Doris |
| 向量数据库 | pgvector、Qdrant、LanceDB、Turbopuffer |
| 图数据库 | Neo4j、FalkorDB、SurrealDB |
| 消息队列 | Kafka、Apache Iggy |
| 对象存储 | Amazon S3、Google Drive、OCI Object Storage |
| 本地文件 | localfs(支持 watch) |
这意味着你可以用同一个声明式模型构建不同类型的索引:向量搜索索引、知识图谱、全文搜索表、甚至 Kafka 消息流——增量同步的逻辑对所有后端都是一样的。
什么时候用 CocoIndex,什么时候不用
适合的场景:
- 你在构建 RAG 应用,需要让知识库索引随源数据保持同步
- 你的源数据持续变化(代码仓库、文档库、Slack、邮件),不想每次全量重建
- 你的数据管道涉及昂贵的操作(嵌入生成、LLM 调用),希望只在必要时执行
- 你需要同时维护多种目标(向量数据库 + 知识图谱 + 搜索索引),希望它们保持一致
- 你需要 Live 模式,让索引在亚秒级别保持新鲜
不适合的场景:
- 一次性的数据分析或探索(你只需要跑一次,不需要增量)——直接用 Pandas / Polars
- 大规模的多模态数据批处理(百万张图片的分类、转码)——Daft 或 Ray Data 更合适,它们的执行引擎针对吞吐量优化
- 纯实时流处理(毫秒级延迟的事件处理)——Flink / Kafka Streams 更合适
- 简单的 CRUD 同步(数据库表到表的复制)——CDC 工具(Debezium)更直接
一个有趣的对比:Daft 和 CocoIndex 解决的是数据管道的两个不同维度的问题。Daft 优化的是单次执行的效率——如何让一次全量处理尽可能快(流水线并行、资源隔离、filter 下推)。CocoIndex 优化的是多次执行之间的效率——如何让连续的增量更新尽可能少做(memo 缓存、组件所有权、reconciliation)。它们不冲突,甚至可以互补——你可以在 CocoIndex 的处理函数里使用 Daft 来高效处理每一批数据。
为什么不用 Flink
这是一个值得认真回答的问题。Flink 也在做"数据变了 → 更新下游"的事情,而且它是一个久经生产验证的系统。CocoIndex 做的事情,Flink 能不能做?
技术上可以,但你会一直在和框架的设计意图对着干。
Flink 的核心抽象是事件流上的有状态计算——无限的事件序列,每条事件触发一次算子执行,状态在 checkpoint 中持久化。CocoIndex 的核心抽象是源到目标的声明式同步——有限但持续变化的数据集,声明目标应该长什么样,引擎负责 diff 和 reconciliation。
这两个抽象层次的差异,在以下几个具体场景中会变得非常明显:
文件修改
Flink 的 FileSource 是面向"新文件出现"设计的(append-only 语义)。一个文件被修改了,FileSource 默认不会重新读取它。你需要自己写 Custom Source,定期扫描文件的 mtime 或 content hash,发现变化后重新发出整个文件内容。这不是不行,但你已经在 Flink 里重新造一个文件变更检测系统了。
CocoIndex 的 localfs.walk_dir(live=True) 原生支持文件修改检测,配合 memo=True,只有内容真正变化的文件才会触发重新处理。
文件删除 → 清理下游
这是最拧巴的地方。假设文件 A 之前产生了 5 个 chunks 写入了向量数据库,现在文件 A 被删除了。
在 Flink 里,你需要:
- 自己检测文件被删了——
FileSource不管删除事件,你得自己写扫描逻辑 - 在 Keyed State 里查出文件 A 对应哪 5 个 chunk ID——你得自己维护这个映射
- 对每个 chunk 发一条 retraction / DELETE 事件到下游
- 下游 sink 收到 DELETE 事件后执行数据库删除——你得在 sink 里写处理删除的逻辑
每一步都要你自己写。而在 CocoIndex 里,文件对应的组件不再被 mount,它"拥有"的目标状态自动被清理。零行代码。
代码逻辑变更
你把 chunk_size 从 2000 改成 1000。在 Flink 里:
- 停掉 job
- 判断是否能从 savepoint 恢复(大概率不行,因为算子逻辑变了,state schema 可能不兼容)
- 清空下游数据库
- 从头重跑整个 job
Flink 的 state 是为运行时连续性设计的(checkpoint、savepoint),不是为逻辑变更后的缓存失效设计的。CocoIndex 的 code hash 让这变成一件自动的事——逻辑变了,指纹变了,缓存失效,只重新处理需要的部分。
操作成本
为了"监听 5000 个文件,增量更新向量数据库"这个需求,Flink 需要一个 JVM 集群(JobManager + TaskManager,至少也得一个 standalone 进程)。CocoIndex 是 pip install cocoindex + 一个 Python 进程。
总结
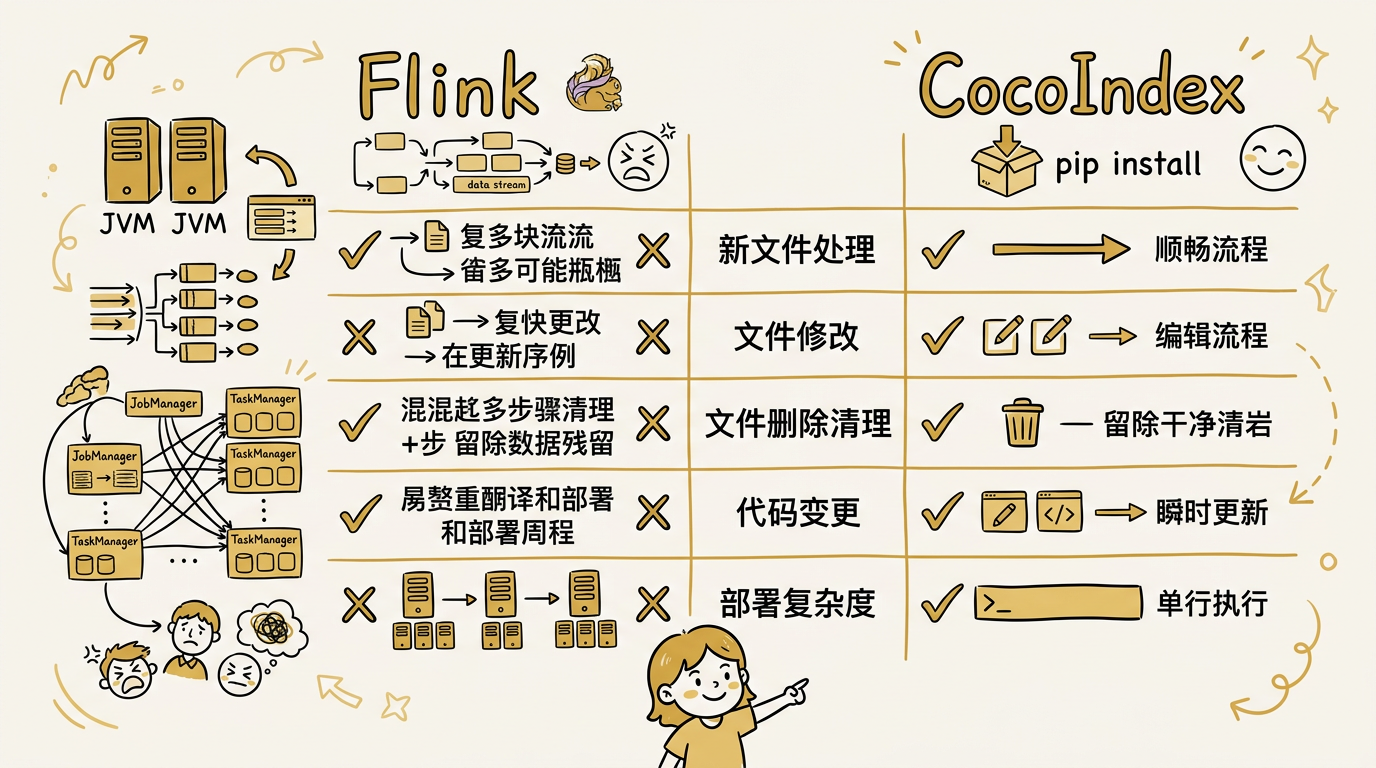
| 场景 | Flink | CocoIndex |
|---|---|---|
| 新文件出现 → 处理 | 原生支持 | 原生支持 |
| 文件修改 → 重新处理 | 自己写 Custom Source | 自动(memo 失效) |
| 文件删除 → 清理下游 | 自己写 retraction 链路 | 自动(所有权清理) |
| 代码逻辑变了 → 重新计算 | 停 job、清数据、重跑 | 自动(code hash 失效) |
| 部署复杂度 | JVM 集群 | pip install + 单进程 |
Flink 的强项在别处:高吞吐的事件流处理、毫秒级延迟的实时计算、复杂的窗口聚合和流式 JOIN。这些 CocoIndex 做不了。但在"持续变化的数据集 → 保持下游索引新鲜"这个特定问题上,Flink 的抽象层次太低了——你要手动实现的增量逻辑,比你的业务逻辑还多。
回到开头
几千篇产品文档,每天几十次更新,Support Agent 的索引需要保持新鲜——这个问题的本质是"源到目标"的持续同步。
CocoIndex 做的事情,是把这个同步逻辑从你的代码中抽走:组件所有权让你不用写清理逻辑,memo 指纹让你不用写缓存逻辑,代码 hash 让你不用担心逻辑变更后缓存过期,reconciliation 让你不用写 INSERT/UPDATE/DELETE 判断,Live 模式让你不用写文件监听和增量触发。
你只需要声明"每个文件应该产生什么数据",其余的交给引擎。
这就是 CocoIndex 的核心主张:索引管道不应该比业务逻辑更难写。 或者用它自己的话说——Your agents deserve fresh context.
前端开发者花了十年时间,从手动操作 DOM 走到了 React 的声明式模型。数据管道正在经历类似的演进:从手写增量逻辑,到声明目标状态。CocoIndex 是这条路上的一个值得关注的尝试。
Takeaway
增量的核心难题不是"检测变化",而是"清理过时数据"。 检测哪些文件变了(比对 mtime / hash)相对简单。真正难的是:文件删了,它下游产生的 chunks 怎么找到并删掉?代码逻辑改了,哪些缓存该失效?这些关联关系的维护才是手写增量逻辑最容易出 bug 的地方。CocoIndex 用组件所有权追踪解决了前者,用 code hash 纳入 memo 指纹解决了后者。
“声明目标状态"和"编写同步逻辑"是两种本质不同的编程模型。 前者只说"结果应该是什么样”,后者要说"如果 A 变了就做 X,如果 B 删了就做 Y,如果代码改了就做 Z"。后者的分支数量随场景复杂度指数增长。CocoIndex 的价值在于让你只写前者,把后者收进框架。这和 React(声明 UI 状态 vs 手动操作 DOM)、SQL(声明查询意图 vs 手写遍历逻辑)是同一个演进方向。